|
|
|
Towards a next-generation production system for industrial robots: A CPS-based hybrid architecture for smart assembly shop floors with closed-loop dynamic cyber physical interactions |
Qingmeng TAN, Yifei TONG( ), Shaofeng WU, Dongbo LI ), Shaofeng WU, Dongbo LI |
| School of Mechanical Engineering, Nanjing University of Science & Technology, Nanjing 210094, China |
|
|
|
|
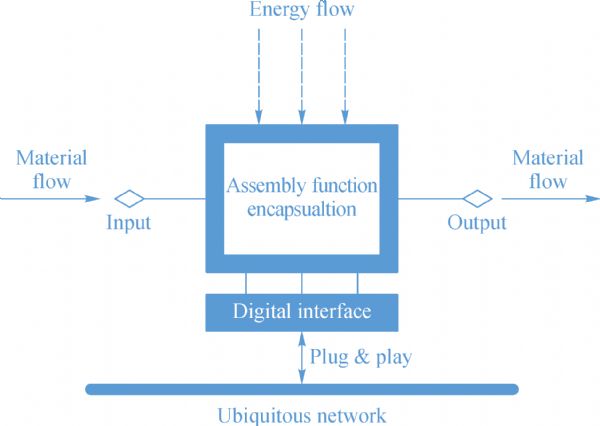
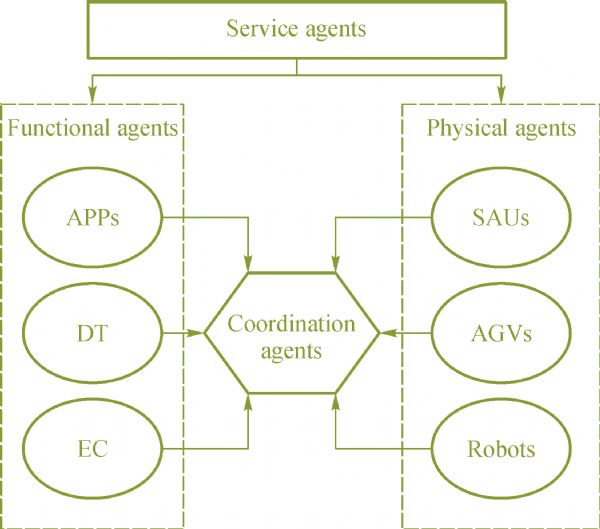
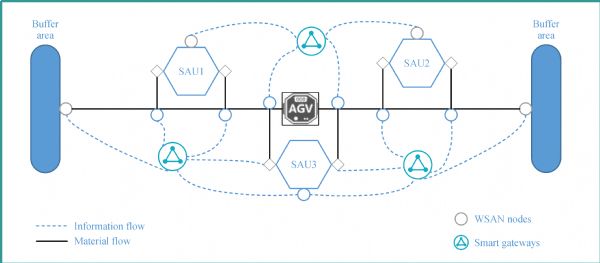
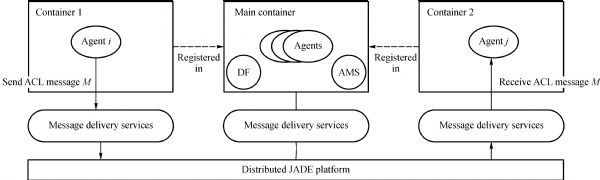
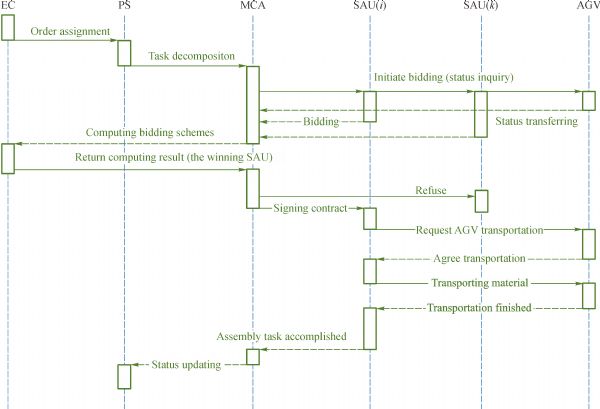
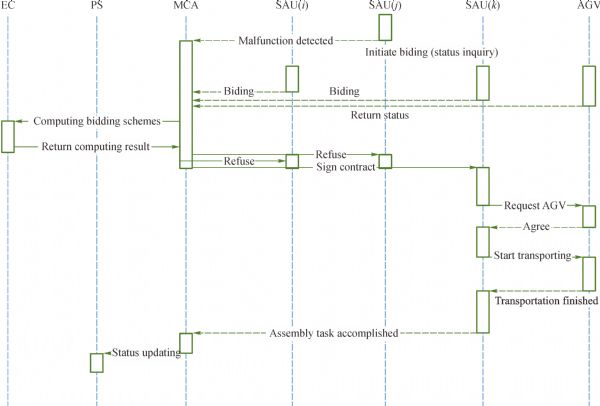
Abstract Given the multiple varieties and small batches, the production of industrial robots faces the ongoing challenges of flexibility, self-organization, self-configuration, and other “smart” requirements. Recently, cyber physical systems have provided a promising solution for the requirements mentioned above. Despite recent progress, some critical issues have not been fully addressed at the shop floor level, including dynamic reorganization and reconfiguration, ubiquitous networking, and time constrained computing. Toward the next generation production system for industrial robots, this study proposed a hybrid architecture for smart assembly shop floors with closed-loop dynamic cyber physical interactions. Aiming for dynamic reorganization and reconfiguration, the study also proposed modularized smart assembly units for the deployment of physical assembly processes. Enabling technologies, such as multiagent system (MAS), self-organized wireless sensor actuator networks, and edge computing, were discussed and then integrated into the proposed architecture. Furthermore, a multijoint robot assembly process was selected as a target scenario. Thus, an MAS was developed to simulate the coordination and negotiation mechanisms for the proposed architecture on the basis of the Java Agent Development Framework platform.
|
| Keywords
cyber physical system
robot assembly
multiagent system
architecture
|
|
Corresponding Author(s):
Yifei TONG
|
|
Just Accepted Date: 27 December 2019
Online First Date: 20 January 2020
Issue Date: 21 February 2020
|
|
| 1 |
IFR forecast: 1.7 million new robots to transform the world’s factories by 2020. Available at International Federation of Robotics website on September 27, 2017
|
| 2 |
L Monostori, B Kádár, T, Bauernhansl et al. Cyber-physical systems in manufacturing. CIRP Annals, 2016, 65(2): 621–641
https://doi.org/10.1016/j.cirp.2016.06.005
|
| 3 |
J Lee, B Bagheri, H Kao. A cyber-physical systems architecture for Industry 4.0-based manufacturing systems. Manufacturing Letters, 2015, 3: 18–23
https://doi.org/10.1016/j.mfglet.2014.12.001
|
| 4 |
S Wang, J Wan, D Zhang, et al. Towards smart factory for industry 4.0: A self-organized multi-agent system with big data based feedback and coordination. Computer Networks, 2016, 101: 158–168
https://doi.org/10.1016/j.comnet.2015.12.017
|
| 5 |
C Liu, P Jiang. A cyber-physical system architecture in shop floor for intelligent manufacturing. Procedia CIRP, 2016, 56: 372–377
https://doi.org/10.1016/j.procir.2016.10.059
|
| 6 |
K Thramboulidis, D C Vachtsevanou, A Solanos. Cyber-physical microservices: An IoT-based framework for manufacturing systems. 2018 IEEE Industrial Cyber-Physical Systems (ICPS), 2018, 232–239
https://doi.org/10.1109/ICPHYS.2018.8387665
|
| 7 |
F Lu. The ZigBee based wireless sensor and actor network in intelligent space oriented to home service robot. International Journal of Communications, Network and System Sciences, 2012, 5(5): 280–285
https://doi.org/10.4236/ijcns.2012.55037
|
| 8 |
G Horvat, D Zagar, J Vlaovic. Evaluation of quality of service provisioning in large-scale pervasive and smart collaborative wireless sensor and actor networks. Advanced Engineering Informatics, 2017, 33: 258–273
https://doi.org/10.1016/j.aei.2016.10.003
|
| 9 |
V K Manupati, G D Putnik, M K Tiwari, et al. Integration of process planning and scheduling using mobile-agent based approach in a networked manufacturing environment. Computers & Industrial Engineering, 2016, 94: 63–73
https://doi.org/10.1016/j.cie.2016.01.017
|
| 10 |
A V Barenji, R V Barenji, M Hashemipour. Flexible testing platform for employment of RFID-enabled multi-agent system on flexible assembly line. Advances in Engineering Software, 2016, 91: 1–11
https://doi.org/10.1016/j.advengsoft.2015.08.010
|
| 11 |
R Cupek, A Ziebinski, L Huczala, et al.Agent-based manufacturing execution systems for short-series production scheduling. Computers in Industry, 2016, 82: 245–258
https://doi.org/10.1016/j.compind.2016.07.009
|
| 12 |
W Shen, Q Hao, H J Yoon, et al.Applications of agent-based systems in intelligent manufacturing: An updated review. Advanced Engineering Informatics, 2006, 20(4): 415–431
https://doi.org/10.1016/j.aei.2006.05.004
|
| 13 |
S Giordani, M Lujak, F Martinelli. A distributed multi-agent production planning and scheduling framework for mobile robots. Computers & Industrial Engineering, 2013, 64(1): 19–30
https://doi.org/10.1016/j.cie.2012.09.004
|
| 14 |
N He, D Z Zhang, Q Li. Agent-based hierarchical production planning and scheduling in make-to-order manufacturing system. International Journal of Production Economics, 2014, 149: 117–130
https://doi.org/10.1016/j.ijpe.2013.08.022
|
| 15 |
H E Nouri, O Belkahla Driss, K Ghédira. Simultaneous scheduling of machines and transport robots in flexible job shop environment using hybrid metaheuristics based on clustered holonic multiagent model. Computers & Industrial Engineering, 2016, 102: 488–501
https://doi.org/10.1016/j.cie.2016.02.024
|
| 16 |
P Leitão, S Karnouskos, L Ribeiro, et al. Smart agents in industrial cyber-physical systems. Proceedings of the IEEE, 2016, 104(5): 1086–1101
https://doi.org/10.1109/JPROC.2016.2521931
|
| 17 |
R van der Meulen. Gartner says 8.4 billion connected “Things” will be in use in 2017, up 31 percent from 2016. Available at Gartner website on February 7, 2017
|
| 18 |
M Satyanarayanan. The emergence of edge computing. Computer, 2017, 50(1): 30–39
https://doi.org/10.1109/MC.2017.9
|
| 19 |
Y Ai, M Peng, K Zhang. Edge cloud computing technologies for Internet of Things: A primer. Digital Communications and Networks, 2018, 4(2): 77–86
https://doi.org/10.1016/j.dcan.2017.07.001
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|