|
|
|
Novel method of constructing generalized Hoberman sphere mechanisms based on deployment axes |
Xuemin SUN1, Yan-An YAO1( ), Ruiming LI2() ), Ruiming LI2() |
1. School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing 100044, China
2. Robotics Institute, Beihang University, Beijing 100191, China |
|
|
|
|
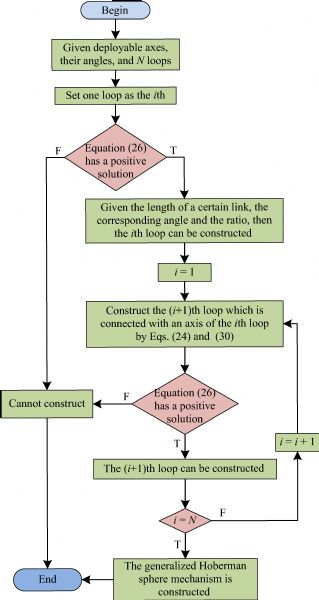
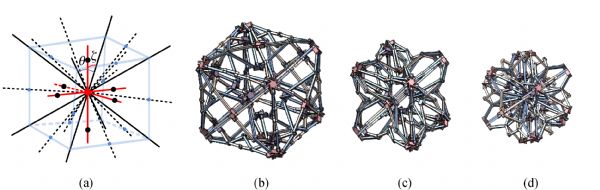
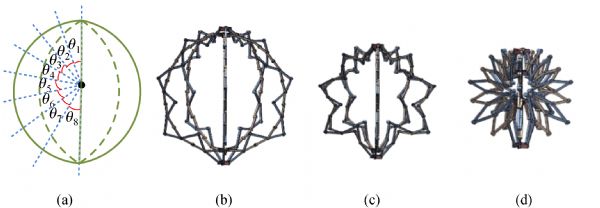
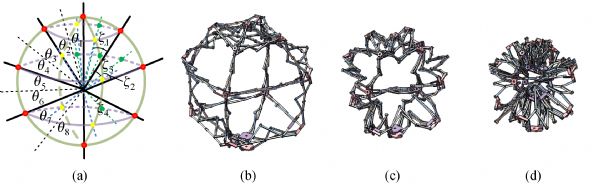
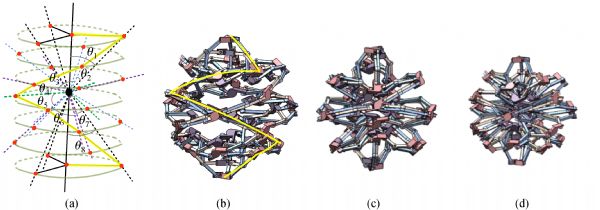
Abstract This study proposes a method of constructing type II generalized angulated elements (GAEs II) Hoberman sphere mechanisms on the basis of deployment axes that intersect at one point. First, the constraint conditions for inserting n GAEs II into n deployment axes to form a loop are given. The angle constraint conditions of the deployment axes are obtained through a series of linear equations. Second, the connection conditions of two GAEs II loops that share a common deployable center are discussed. Third, a flowchart of constructing the generalized Hoberman sphere mechanism on the basis of deployment axes is provided. Finally, four generalized Hoberman sphere mechanisms based on a fully enclosed regular hexahedron, arithmetic sequence axes, orthonormal arithmetic sequence axes, and spiral-like axes are constructed in accordance with the given arrangement of deployment axes that satisfy the constraint conditions to verify the feasibility of the proposed method.
|
| Keywords
deployable mechanism
type II generalized angulated elements
Hoberman sphere mechanism
deployment axes
constraint conditions
|
|
Corresponding Author(s):
Yan-An YAO,Ruiming LI
|
|
Just Accepted Date: 04 November 2019
Online First Date: 11 December 2019
Issue Date: 21 February 2020
|
|
| 1 |
E P Piñero. Project for a mobile theatre. Architectural Design, 1961, 12(1): 154–155
|
| 2 |
T R Zeigler. US Patent, 4290244, 1981-9-22
|
| 3 |
F Escrig. Expandable space structures. International Journal of Space Structures, 1985, 1(2): 79–91
https://doi.org/10.1177/026635118500100203
|
| 4 |
F Escrig, J P Valcarcel. Geometry of expandable space structures. International Journal of Space Structures, 1993, 8(1–2): 71–84
https://doi.org/10.1177/0266351193008001-208
|
| 5 |
Z You. Deployable structure of curved profile for space antennas. Journal of Aerospace Engineering, 2000, 13(4): 139–143
https://doi.org/10.1061/(ASCE)0893-1321(2000)13:4(139)
|
| 6 |
C Hoberman. US Patent, 4942700, 1990-7-24
|
| 7 |
C Hoberman. US Patent, 5024031, 1991-6-18
|
| 8 |
Z You, S Pellegrino. Foldable bar structures. International Journal of Solids and Structures, 1997, 34(15): 1825–1847
https://doi.org/10.1016/S0020-7683(96)00125-4
|
| 9 |
J Patel, G K Ananthasuresh. A kinematic theory for radially foldable planar linkages. International Journal of Solids and Structures, 2007, 44(18–19): 6279–6298
https://doi.org/10.1016/j.ijsolstr.2007.02.023
|
| 10 |
J Cai, Y Xu, J Feng. Kinematic analysis of Hoberman’s linkages with the screw theory. Mechanism and Machine Theory, 2013, 63(63): 28–34
https://doi.org/10.1016/j.mechmachtheory.2013.01.004
|
| 11 |
J Cai, X Deng, J Feng, et al. Mobility analysis of generalized angulated scissor-like elements with the reciprocal screw theory. Mechanism and Machine Theory, 2014, 82: 256–265
https://doi.org/10.1016/j.mechmachtheory.2014.07.011
|
| 12 |
Y Chen, L Fan, J Feng. Kinematic of symmetric deployable scissor-hinge structures with integral mechanism mode. Computers & Structures, 2017, 191: 140–152
https://doi.org/10.1016/j.compstruc.2017.06.006
|
| 13 |
G Bai, Q Liao, D Li, et al. Synthesis of scaling mechanisms for geometric figures with angulated-straight elements.Proceedings of the Institution of Mechanical Engineers. Part C, Journal of Mechanical Engineering Science, 2013, 227(12): 2795–2809
https://doi.org/10.1177/0954406213478280
|
| 14 |
K Wohlhart. Cyclic polyhedra and linkages derived therefrom. Mechanism and Machine Theory, 2017, 108: 142–159
https://doi.org/10.1016/j.mechmachtheory.2016.10.014
|
| 15 |
K Wohlhart. Equally circumscribed cyclic polyhedra generalize Platonic solids. Mechanism and Machine Theory, 2019, 133: 150–163
https://doi.org/10.1016/j.mechmachtheory.2018.10.004
|
| 16 |
G Wei, J S Dai. Overconstrained mechanisms with radially reciprocating motion. In: Lenarcic J, Stanisic M, eds. Advances in Robot Kinematics: Motion in Man and Machine. Dordrecht: Springer, 2010, 293–300
https://doi.org/10.1007/978-90-481-9262-5_31
|
| 17 |
R Li, Y A Yao, X Kong. A class of reconfigurable deployable platonic mechanisms. Mechanism and Machine Theory, 2016, 105: 409–427
https://doi.org/10.1016/j.mechmachtheory.2016.07.019
|
| 18 |
R Li, Y A Yao, X Ding. A family of reconfigurable deployable polyhedral mechanisms based on semiregular and Johnson polyhedral. Mechanism and Machine Theory, 2018, 126: 344–358
https://doi.org/10.1016/j.mechmachtheory.2018.04.021
|
| 19 |
R Li, X Sun, Y Chen, et al. Design and analysis of reconfigurable deployable polyhedral mechanisms with straight elements. Journal of Mechanisms and Robotics, 2019, 11(4): 044502
https://doi.org/10.1115/1.4043601
|
| 20 |
G Kiper, E Söylemez, A U Ö Kişisel. Polyhedral linkages synthesized using Cardan Motion along radial axes. In: Proceedings of the 12th IFToMM World Congress. Besançon, 2007, 17–21
|
| 21 |
W B Shieh. Design of the deployable mechanisms based on the Cardanic motion of planar four-bar linkage. In: Proceedings of ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Buffalo: ASME, 2014, DETC2014–34838 V05AT08-A061
https://doi.org/10.1115/DETC2014-34838
|
| 22 |
H Huang, B Li, J Zhu, et al. A new family of Bricard-derived deployable mechanisms. Journal of Mechanisms and Robotics, 2016, 8(3): 034503
https://doi.org/10.1115/1.4032119
|
| 23 |
H Huang, B Li, T Zhang, et al. Design of large single-mobility surface-deployable mechanism using irregularly shaped triangular prismoid modules. Journal of Mechanical Design, 2019, 141(1): 012301
https://doi.org/10.1115/1.4041178
|
| 24 |
X Qi, H Huang, Z Miao, et al. Design and mobility analysis of large deployable mechanisms based on plane-symmetric Bricard linkage. Journal of Mechanical Design, 2017, 139(2): 022302
https://doi.org/10.1115/1.4035003
|
| 25 |
J Wang, X Kong. Deployable polyhedron mechanisms constructed by connecting spatial single-loop linkages of different types and/or in different sizes using S joints. Mechanism and Machine Theory, 2018, 124: 211–225
https://doi.org/10.1016/j.mechmachtheory.2018.03.002
|
| 26 |
D St-Onge, C Gosselin. Synthesis and design of a one degree-of-freedom planar deployable mechanism with a large expansion ratio. Journal of Mechanisms and Robotics, 2016, 8(2): 021025
https://doi.org/10.1115/1.4032101
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|