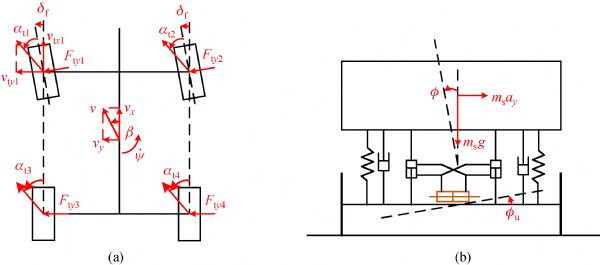
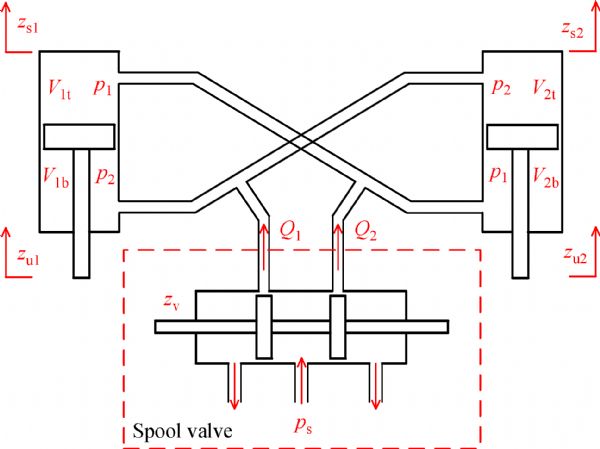
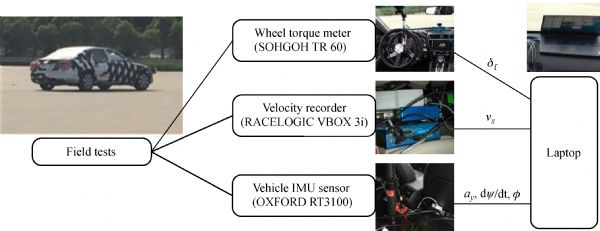
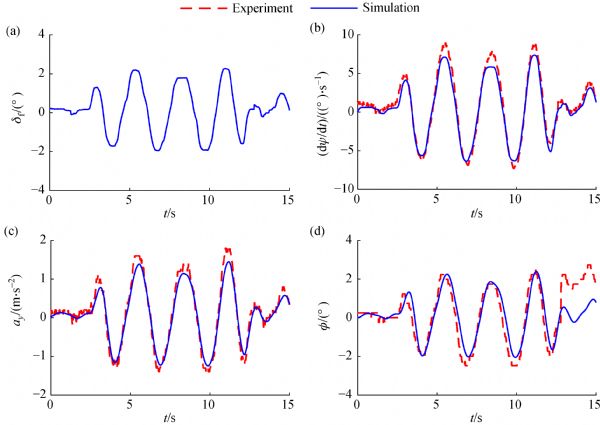
This study examines roll stability control for vehicles with an active roll-resistant electro-hydraulic suspension (RREHS) subsystem under steering maneuvers. First, we derive a vehicle model with four degrees of freedom and incorporates yaw and roll motions. Second, an optimal linear quadratic regulator controller is obtained in consideration of dynamic vehicle performance. Third, an RREHS subsystem with an electric servo-valve actuator is proposed, and the corresponding dynamic equations are obtained. Fourth, field experiments are conducted to validate the performance of the vehicle model under sine-wave and double-lane-change steering maneuvers. Finally, the effectiveness of the active RREHS is determined by examining vehicle responses under sine-wave and double-lane-change maneuvers. The enhancement in vehicle roll stability through the RREHS subsystem is also verified.
Height from vehicle rolling center to CG of sprung mass
hoc/m
0.11
Height from vehicle rolling center to chassis bottom
isw
17.5
Steering ratio
Variable
Value
Description
Ah/m2
0.0013
Section area of the hydraulic cylinders
V0/m3
3.77×10–4
V0=V10+V20; total oil volume in each cylinder
ps/MPa
6.0
Supply pressure
kx/(m2?s)
2.5
Valve flow gain coefficient
kp/(m5?N–1?s–1)
4.2×10–11
Total flow pressure coefficient
Ctp
0
Ctp=2Cip+Cep; total leakage coefficient of the RREHS subsystem
be/(N?m–2)
6.89×106
Effective bulk modulus of the oil
kv/(m?A–1)
0.0239
Servo-valve gain
1
B L Boada, M J L Boada, L Vargas-Melendez, et al.. A robust observer based on H∞ filtering with parameter uncertainties combined with neural networks for estimation of vehicle roll angle. Mechanical Systems and Signal Processing, 2018, 99: 611–623 https://doi.org/10.1016/j.ymssp.2017.06.044
2
H Dahmani, O Pages, A El Hajjaji, et al.. Observer-based robust control of vehicle dynamics for rollover mitigation in critical situations. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 274–284 https://doi.org/10.1109/TITS.2013.2281135
3
J Yoon, W Cho, J Kang, et al.. Design and evaluation of a unified chassis control system for rollover prevention and vehicle stability improvement on a virtual test track. Control Engineering Practice, 2010, 18(6): 585–597 https://doi.org/10.1016/j.conengprac.2010.02.012
4
R Rajamani, D Piyabongkarn. New paradigms for the integration of yaw stability and rollover prevention functions in vehicle stability control. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(1): 249–261 https://doi.org/10.1109/TITS.2012.2215856
5
C Lua, B Castillo-Toledo, R Cespi, et al.. Nonlinear observer-based active control of ground vehicles with non negligible roll dynamics. International Journal of Control, Automation, and Systems, 2016, 14(3): 743–752 https://doi.org/10.1007/s12555-014-0193-2
6
Z Jin, L Zhang, J Zhang, et al.. Stability and optimised H∞ control of tripped and untripped vehicle rollover. Vehicle System Dynamics, 2016, 54(10): 1405–1427 https://doi.org/10.1080/00423114.2016.1205750
7
Y Yang, W Ren, L Chen, et al.. Study on ride comfort of tractor with tandem suspension based on multi-body system dynamics. Applied Mathematical Modelling, 2009, 33(1): 11–33 https://doi.org/10.1016/j.apm.2007.10.011
8
R Sancibrian, P Garcia, F Viadero, et al.. Kinematic design of double-wishbone suspension systems using a multiobjective optimisation approach. Vehicle System Dynamics, 2010, 48(7): 793–813 https://doi.org/10.1080/00423110903156574
9
M Mahmoodi-Kaleibar, I Javanshir, K Asadi, et al.. Optimization of suspension system of off-road vehicle for vehicle performance improvement. Journal of Central South University of Technology, 2013, 20(4): 902–910 https://doi.org/10.1007/s11771-013-1564-1
10
H Pang, F Liu, X Liu. Enhanced variable-universe fuzzy control for vehicle semi-active suspension systems. Journal of Intelligent & Fuzzy Systems, 2016, 31(6): 2999–3006 https://doi.org/10.3233/JIFS-169184
11
M X Cheng, X H Jiao. Observer-based adaptive L2 disturbance attenuation control of semi-active suspension with MR damper. Asian Journal of Control, 2017, 19(1): 346–355 https://doi.org/10.1002/asjc.1347
12
X Tang, H Du, S Sun, et al.. Takagi-Sugeno fuzzy control for semi-active vehicle suspension with a magnetorheological damper and experimental validation. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 291–300 https://doi.org/10.1109/TMECH.2016.2619361
13
P Gáspár, Z Szabó, G Szederkényi, et al.. Design of a two-level controller for an active suspension system. Asian Journal of Control, 2012, 14(3): 664–678 https://doi.org/10.1002/asjc.386
14
H Li, H Liu, C Hilton, et al.. Non-fragile H∞ control for half-vehicle active suspension systems with actuator uncertainties. Journal of Vibration and Control, 2013, 19(4): 560–575 https://doi.org/10.1177/1077546311434972
15
S Bououden, M Chadli, H R Karimi. A robust predictive control design for nonlinear active suspension systems. Asian Journal of Control, 2016, 18(1): 122–132 https://doi.org/10.1002/asjc.1180
16
G Wang, C Chen, S Yu. Optimization and static output-feedback control for half-car active suspensions with constrained information. Journal of Sound and Vibration, 2016, 378: 1–13 https://doi.org/10.1016/j.jsv.2016.05.033
G Quaglia, M Sorli. Air suspension dimensionless analysis and design procedure. Vehicle System Dynamics, 2001, 35(6): 443–475 https://doi.org/10.1076/vesd.35.6.443.2040
19
M Ahmadian, D E Simon. An analytical and experimental evaluation of magneto rheological suspensions for heavy trucks. Vehicle System Dynamics, 2002, 37(sup1): 38–49 https://doi.org/10.1080/00423114.2002.11666219
20
J Kang, J Yoo, K Yi. Driving control algorithm for maneuverability, lateral stability, and rollover prevention of 4WD electric vehicles with independently driven front and rear wheels. IEEE Transactions on Vehicular Technology, 2011, 60(7): 2987–3001 https://doi.org/10.1109/TVT.2011.2155105
21
H Du, N Zhang. Fuzzy control for nonlinear uncertain electrohydraulic active suspensions with input constraint. IEEE Transactions on Fuzzy Systems, 2009, 17(2): 343–356 https://doi.org/10.1109/TFUZZ.2008.2011814
22
H D Choi, C J Lee, M T Lim. Fuzzy preview control for half-vehicle electro-hydraulic suspension system. International Journal of Control, Automation, and Systems, 2018, 16(5): 2489–2500 https://doi.org/10.1007/s12555-017-0663-4
23
W Sun, H Gao, B Yao. Adaptive robust vibration control of full-car active suspensions with electrohydraulic actuators. IEEE Transactions on Control Systems Technology, 2013, 21(6): 2417–2422 https://doi.org/10.1109/TCST.2012.2237174
S Yim. Design of a preview controller for vehicle rollover prevention. IEEE Transactions on Vehicular Technology, 2011, 60(9): 4217–4226 https://doi.org/10.1109/TVT.2011.2169687
26
H H Huang, R K Yedavalli, D A Guenther. Active roll control for rollover prevention of heavy articulated vehicles with multiple-rollover-index minimization. Vehicle System Dynamics, 2012, 50(3): 471–493 https://doi.org/10.1080/00423114.2011.597863
27
H Imine, L M Fridman, T Madani. Steering control for rollover avoidance of heavy vehicles. IEEE Transactions on Vehicular Technology, 2012, 61(8): 3499–3509 https://doi.org/10.1109/TVT.2012.2206837
28
V F Dal Poggetto, A L Serpa. Vehicle rollover avoidance by application of gain-scheduled LQR controllers using state observers. Vehicle System Dynamics, 2016, 54(2): 191–209 https://doi.org/10.1080/00423114.2015.1125005
29
H Sun, Y H Chen, H Zhao. Adaptive robust control methodology for active roll control system with uncertainty. Nonlinear Dynamics, 2018, 92(2): 359–371 https://doi.org/10.1007/s11071-018-4060-1
30
Y Pourasad, M Mahmoodi-K, M Oveisi. Design of an optimal active stabilizer mechanism for enhancing vehicle rolling resistance. Journal of Central South University, 2016, 23(5): 1142–1151 https://doi.org/10.1007/s11771-016-0364-9
31
J Marzbanrad, G Soleimani, M Mahmoodi-K, et al.. Development of fuzzy anti-roll bar controller for improving vehicle stability. Journal of Vibroengineering, 2015, 17(7): 3856–3864
32
Y Kawamoto, Y Suda, H Inoue, et al.. Electro-mechanical suspension system considering energy consumption and vehicle manoeuvre. Vehicle System Dynamics, 2008, 46(sup1): 1053–1063 https://doi.org/10.1080/00423110802056263
33
S Yim, K Jeon, K Yi. An investigation into vehicle rollover prevention by coordinated control of active anti-roll bar and electronic stability program. International Journal of Control, Automation, and Systems, 2012, 10(2): 275–287 https://doi.org/10.1007/s12555-012-0208-9
34
L Wang, P Todaria, A Pandey, et al.. An electromagnetic speed bump energy harvester and its interactions with vehicles. IEEE/ASME Transactions on Mechatronics, 2016, 21(4): 1985–1994 https://doi.org/10.1109/TMECH.2016.2546179
35
X Jin, G Yin. Estimation of lateral tire-road forces and sideslip angle for electric vehicles using interacting multiple model filter approach. Journal of the Franklin Institute-Engineering and Applied Mathematics, 2015, 352(2): 686–707 https://doi.org/10.1016/j.jfranklin.2014.05.008
36
B Mashadi, M Mahmoodi-K, A H Kakaee, . Vehicle path following control in the presence of driver inputs. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2013, 227(2): 115–132 https://doi.org/10.1177/1464419312469755
37
V T Vu, O Sename, L Dugard, et al.. Enhancing roll stability of heavy vehicle by LQR active anti-roll bar control using electronic servo-valve hydraulic actuators. Vehicle System Dynamics, 2017, 55(9): 1405–1429 https://doi.org/10.1080/00423114.2017.1317822
38
W Ding, H Deng, Y Xia, et al.. Tracking control of electro-hydraulic servo multi-closed-chain mechanisms with the use of an approximate nonlinear internal model. Control Engineering Practice, 2017, 58: 225–241 https://doi.org/10.1016/j.conengprac.2016.11.003
39
J J Rath, M Defoort, K C Veluvolu. Rollover index estimation in the presence of sensor faults, unknown inputs, and uncertainties. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10): 2949–2959 https://doi.org/10.1109/TITS.2016.2536683