Design and analysis of a class of redundant collaborative manipulators with 2D large rotational angles
Xiaodong JIN1,2, Yuefa FANG1(), Dan ZHANG2(), Xueling LUO2
1. Department of Mechanical Engineering, Beijing Jiaotong University, Beijing 100044, China 2. Department of Mechanical Engineering, Lassonde School of Engineering, York University, Toronto M3J 1P3, Canada
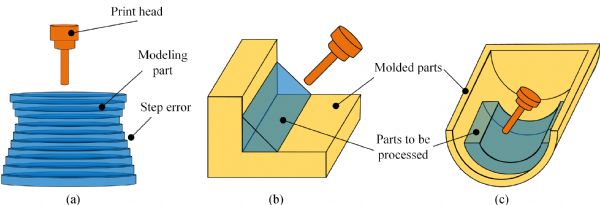
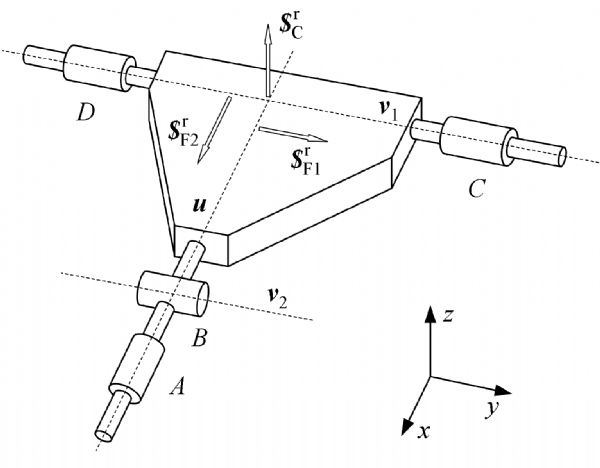
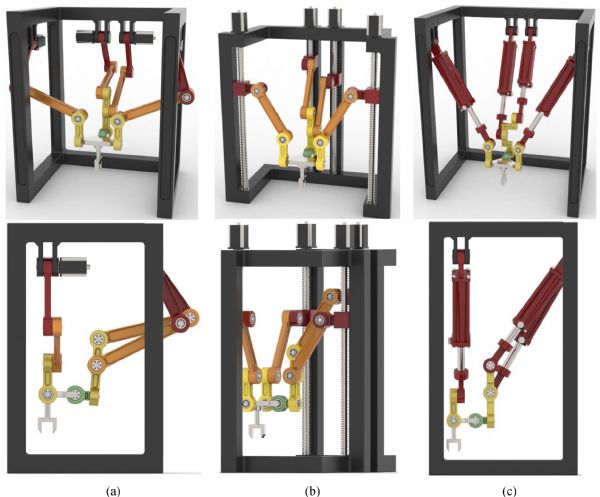
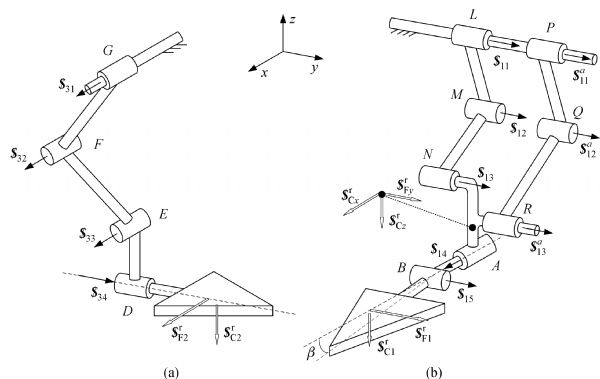
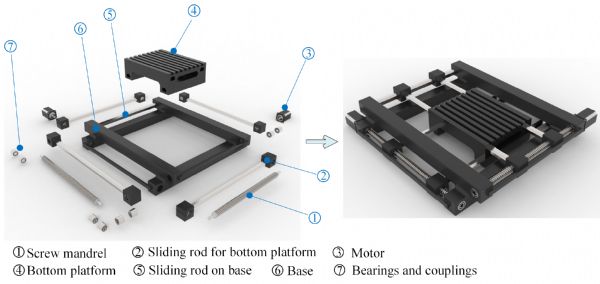
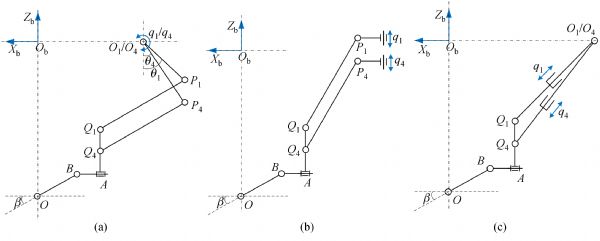
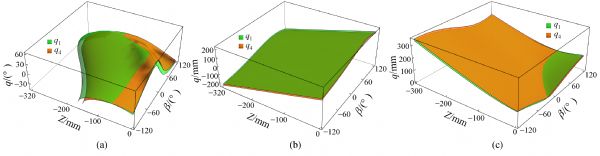
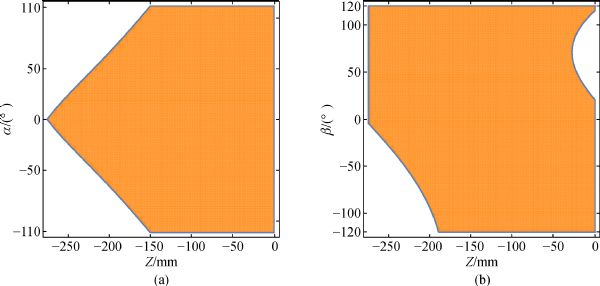
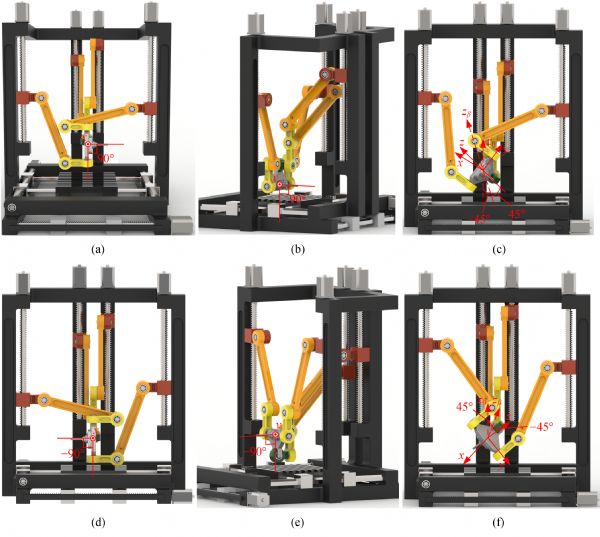
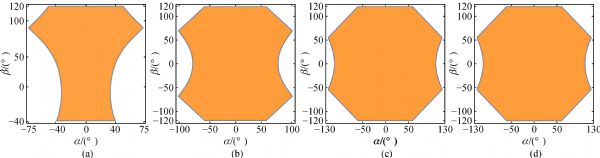
The parallel spindle heads with high rotational capability are demanded in the area of multi-axis machine tools and 3D printers. This paper focuses on designing a class of 2R1T (R: Rotation; T: Translation) parallel spindle heads and the corresponding collaborative 5-axis manipulators with 2-dimension (2D) large rotational angles. In order to construct 2D rotational degrees of freedom (DOFs), a platform with 2D revolute joints is proposed first. Based on the constraint screw theory, the feasible limbs that can be connected in the platform are synthesized. In order to provide constant rotational axis for the platform, a class of redundant limbs are designed. A class of redundant 2R1T parallel spindle heads is obtained by connecting the redundant limbs with the platform and the redundant characteristics are verified by the modified Grübler-Kutzbach criterion. The corresponding 5-axis collaborative manipulators are presented by constructing a 2-DOF series translational bottom moving platform. The inverse kinematics and the orientation workspace as well as the decoupling characteristics of this type of 2R1T parallel spindle heads are analyzed. The results show that these manipulators have large 2D rotational angles than the traditional A3/Z3 heads and can be potentially used in the application of multi-axis machine tools and the 3D printers.
. [J]. Frontiers of Mechanical Engineering, 2020, 15(1): 66-80.
Xiaodong JIN, Yuefa FANG, Dan ZHANG, Xueling LUO. Design and analysis of a class of redundant collaborative manipulators with 2D large rotational angles. Front. Mech. Eng., 2020, 15(1): 66-80.
T Sun, S F Yang, T Huang, et al.A finite and instantaneous screw based approach for topology design and kinematic analysis of 5-axis parallel kinematic machines. Chinese Journal of Mechanical Engineering, 2018, 31(1): 44 https://doi.org/10.1186/s10033-018-0241-6
Q C Li, Z Huang, J M Hervé. Type synthesis of 3R2T 5-DOF parallel mechanisms using the Lie group of displacements. IEEE Transactions on Robotics and Automation, 2004, 20(2): 173–180 https://doi.org/10.1109/TRA.2004.824650
4
J H Shim, D S Kwon, H S Cho. Kinematic analysis and design of a six DOF 3-PRPS in-parallel manipulator. Robotica, 1999, 17(3): 269–281 https://doi.org/10.1017/S0263574799001368
5
J Sofka, V Skormin, V Nikulin, et al.Omni-Wrist III—A new generation of pointing devices. Part I. Laser beam steering devices—Mathematical modeling. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(2): 718–725 https://doi.org/10.1109/TAES.2006.1642584
6
J Sofka, V Skormin, V Nikulin, et al.Omni-Wrist III—A new generation of pointing devices. Part II. Gimbals systems—Control. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(2): 726–734 https://doi.org/10.1109/TAES.2006.1642585
7
O Company, F Marquet, F Pierrot. A new high-speed 4-DOF parallel robot synthesis and modeling issues. IEEE Transactions on Robotics and Automation, 2003, 19(3): 411–420 https://doi.org/10.1109/TRA.2003.810232
8
S Krut, M Benoit, H Ota, et al.. I4: A new parallel mechanism for Scara motions. In: Proceedings of the 2003 IEEE International Conference on Robotics and Automation. New York: IEEE, 2003, 1875–1880 https://doi.org/10.1109/ROBOT.2003.1241868
9
V Nabat, M Rodriguez, O Company, et al.. Par4: Very high speed parallel robot for pick-and-place. In: Proceedings of the IEEE/RSJ international Conference on Intelligent Robots and Systems (IROS). Washington, DC: IEEE Computer Society, 2005, 553–558
10
S Guo, W Ye, H B Qu, et al.A serial of novel four degrees of freedom parallel mechanisms with large rotational workspace. Robotica, 2016, 34(4): 764–776 https://doi.org/10.1017/S0263574714001842
11
S Guo, Y F Fang, H B Qu. Type synthesis of 4-DOF no overconstrained parallel mechanisms based on screw theory. Robotica, 2012, 30(1): 31–37 https://doi.org/10.1017/S0263574711000439
12
C Z Wang, Y F Fang, H R Fang. Novel 2R3T and 2R2T parallel mechanisms with high rotational capability. Robotica, 2017, 35(2): 401–418 https://doi.org/10.1017/S0263574715000636
13
C Z Wang, Y F Fang, S Guo. Design and analysis of 3R2T and 3R3T parallel mechanisms with high rotational capability. Journal of Mechanisms and Robotics, 2016, 8(1): 011004 https://doi.org/10.1115/1.4029834
14
Q C Li, Q H Chen, C Y Wu, et al.Geometrical distribution of rotational axes of 3-[R][S] parallel mechanisms. Mechanism and Machine Theory, 2013, 65(7): 46–57 https://doi.org/10.1016/j.mechmachtheory.2013.02.007
15
L M Xu, Q C Li, N B Zhang, et al.Mobility, kinematic analysis, and dimension optimization of new three-degrees-of-freedom parallel manipulator with actuation redundancy. Journal of Mechanisms and Robotics, 2017, 9(4): 041008 https://doi.org/10.1115/1.4036517
16
F G Xie, X J Liu, Y H Zhou. Development and experimental study of a redundant hybrid machine with five-face milling capability in one setup. International Journal of Precision Engineering and Manufacturing, 2014, 15(1): 13–21 https://doi.org/10.1007/s12541-013-0301-x
17
J Wahl. US Patent, US6431802B1, 2002-08-13
18
T Huang, H T Liu. PCT Patent, WO2007124637A1, 2007-08-11
Q C Li, J M Hervé. 1T2R parallel mechanisms without parasitic motion. IEEE Transactions on Robotics, 2010, 26(3): 401–410 https://doi.org/10.1109/TRO.2010.2047528
21
W Ye, L Y He, Q C Li. A new family of symmetrical 2T2R parallel mechanisms without parasitic motion. Journal of Mechanisms and Robotics, 2018, 10(1): 011006 https://doi.org/10.1115/1.4038527
22
Y Wang, J J Yu, X Pei. Fast forward kinematics algorithm for real-time and high-precision control of the 3-RPS parallel mechanism. Frontiers of Mechanical Engineering, 2018, 13(3): 368–375 https://doi.org/10.1007/s11465-018-0519-5
23
L P Wang, H Y Xu, L W Guan. Kinematics and inverse dynamics analysis for a novel 3-PUU parallel mechanism. Robotica, 2016, 35(10): 2018–2035 https://doi.org/10.1017/S0263574716000692
24
Y Li, Q Xu. A new approach to the architecture optimization of a general 3-PUU translational parallel manipulator. Journal of Intelligent & Robotic Systems, 2006, 46(1): 59–72 https://doi.org/10.1007/s10846-006-9044-6
25
L W Tsai. The enumeration of a class of three-DOF parallel manipulators. In: Proceedings of the 10th World Congress on the Theory of Machine and Mechanisms. Oulu, 1999, 1123–1126
26
S F Yang, T Sun, T Huang. Type synthesis of parallel mechanisms having 3T1R motion with variable rotational axis. Mechanism and Machine Theory, 2017, 109: 220–230 https://doi.org/10.1016/j.mechmachtheory.2016.11.005
27
T S Zhao, J S Dai, Z Huang. Geometric synthesis of spatial parallel manipulators with fewer than six degrees of freedom. Proceedings of the Institution of Mechanical Engineers. Part C, Journal of Mechanical Engineering Science, 2002, 216(12): 1175–1185 https://doi.org/10.1243/095440602321029418
28
E Rodriguez-Leal, J S Dai, G R Pennock. Screw-system-based mobility analysis of a family of fully translational parallel manipulators. Mathematical Problems in Engineering, 2013, 2013: 262801 https://doi.org/10.1155/2013/262801
C C Lee, J M Hérve. Parallel mechanisms generating 3-DoF finite translation and (2 or 1)-DOF infinitesimal rotation. Mechanism and Machine Theory, 2012, 51(5): 185–194 https://doi.org/10.1016/j.mechmachtheory.2012.01.005
31
Y Li, L Wang, J F Liu, et al.Applicability and generality of the modified Grübler-Kutzbach criterion. Chinese Journal of Mechanical Engineering, 2013, 26(2): 257–263 https://doi.org/10.3901/CJME.2013.02.257
32
Y F Fang, L W Tsai. Structure synthesis of a class of 4-DoF and 5-DoF parallel manipulators with identical limb structures. International Journal of Robotics Research, 2002, 21(9): 799–810 https://doi.org/10.1177/0278364902021009314
33
W Ye, Y F Fang, K T Zhang, et al.A new family of reconfigurable parallel mechanisms with diamond kinematotropic chain. Mechanism and Machine Theory, 2014, 74(6): 1–9 https://doi.org/10.1016/j.mechmachtheory.2013.11.011
34
G Pond, J Carretero. Architecture optimization of three 3-PRS variants for parallel kinematic machining. Robotics and Computer-integrated Manufacturing, 2009, 25(1): 64–72 https://doi.org/10.1016/j.rcim.2007.09.002
35
Q C Li, Z Chen, Q Chen, et al.Parasitic motion comparison of 3-PRS parallel mechanism with different limb arrangements. Robotics and Computer-integrated Manufacturing, 2011, 27(2): 389–396 https://doi.org/10.1016/j.rcim.2010.08.007
36
X Chen, X J Liu, F G Xie, et al.A comparison study on motion/force transmissibility of two typical 3-DOF parallel manipulators: The sprint Z3 and A3 tool heads. International Journal of Advanced Robotic Systems, 2014, 11(1): 1–10 https://doi.org/10.5772/57458