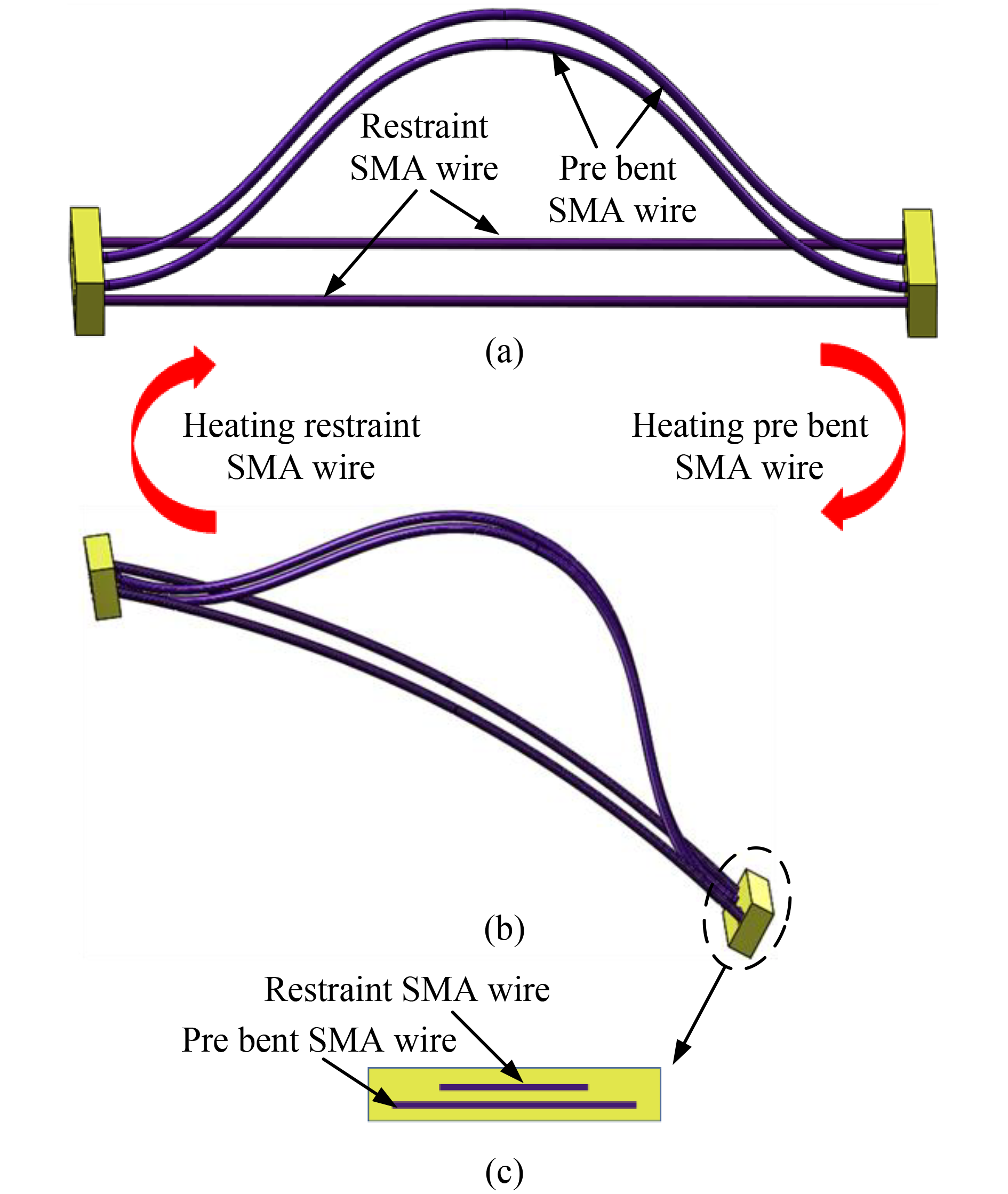
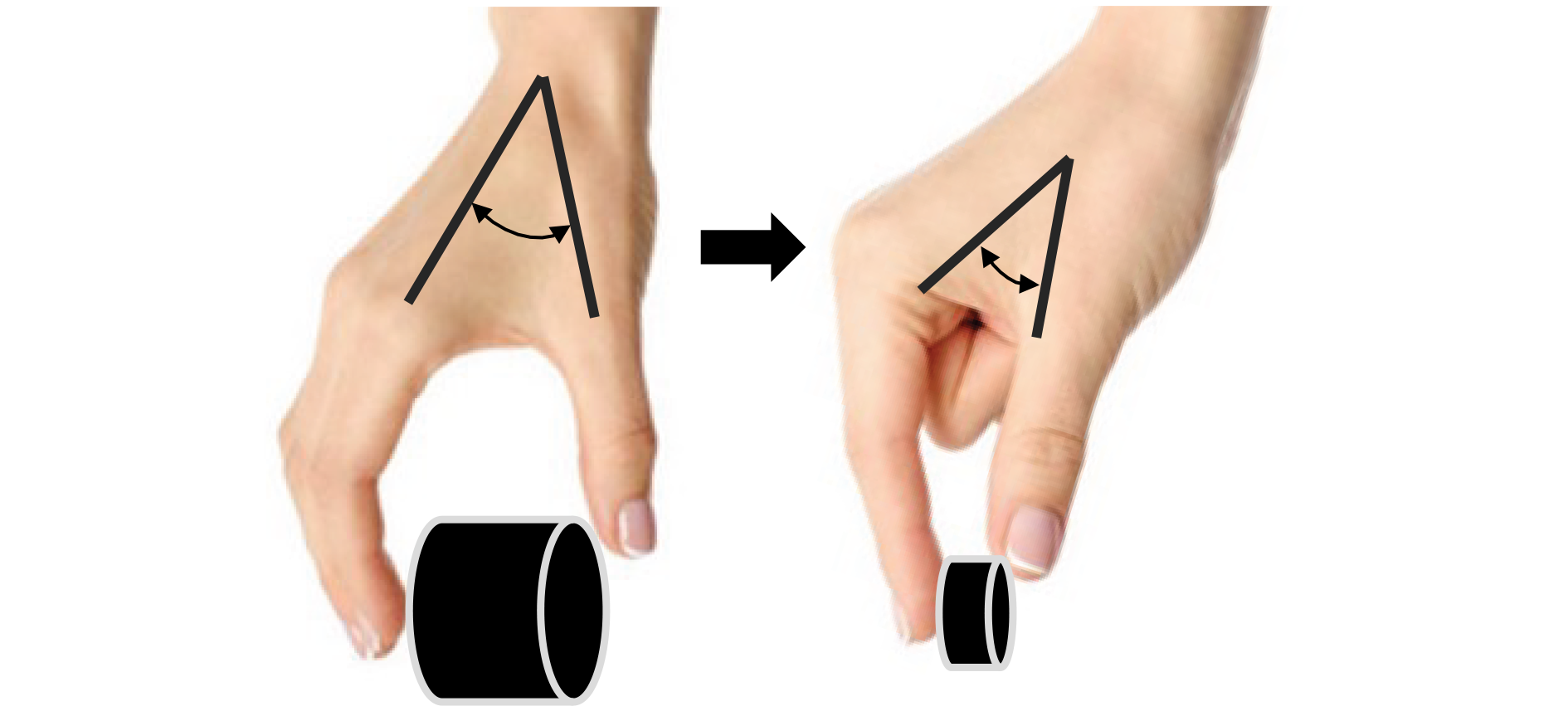
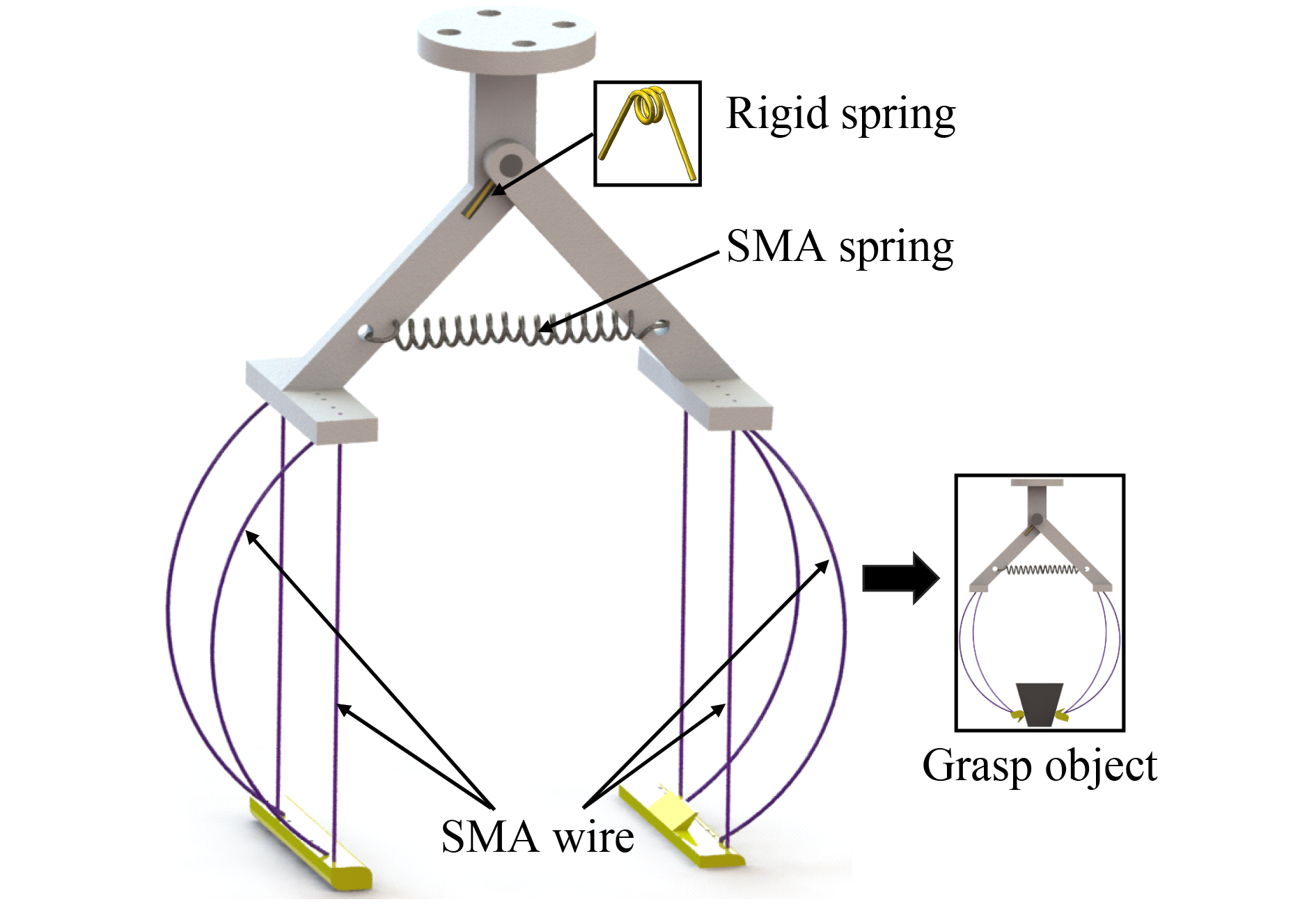
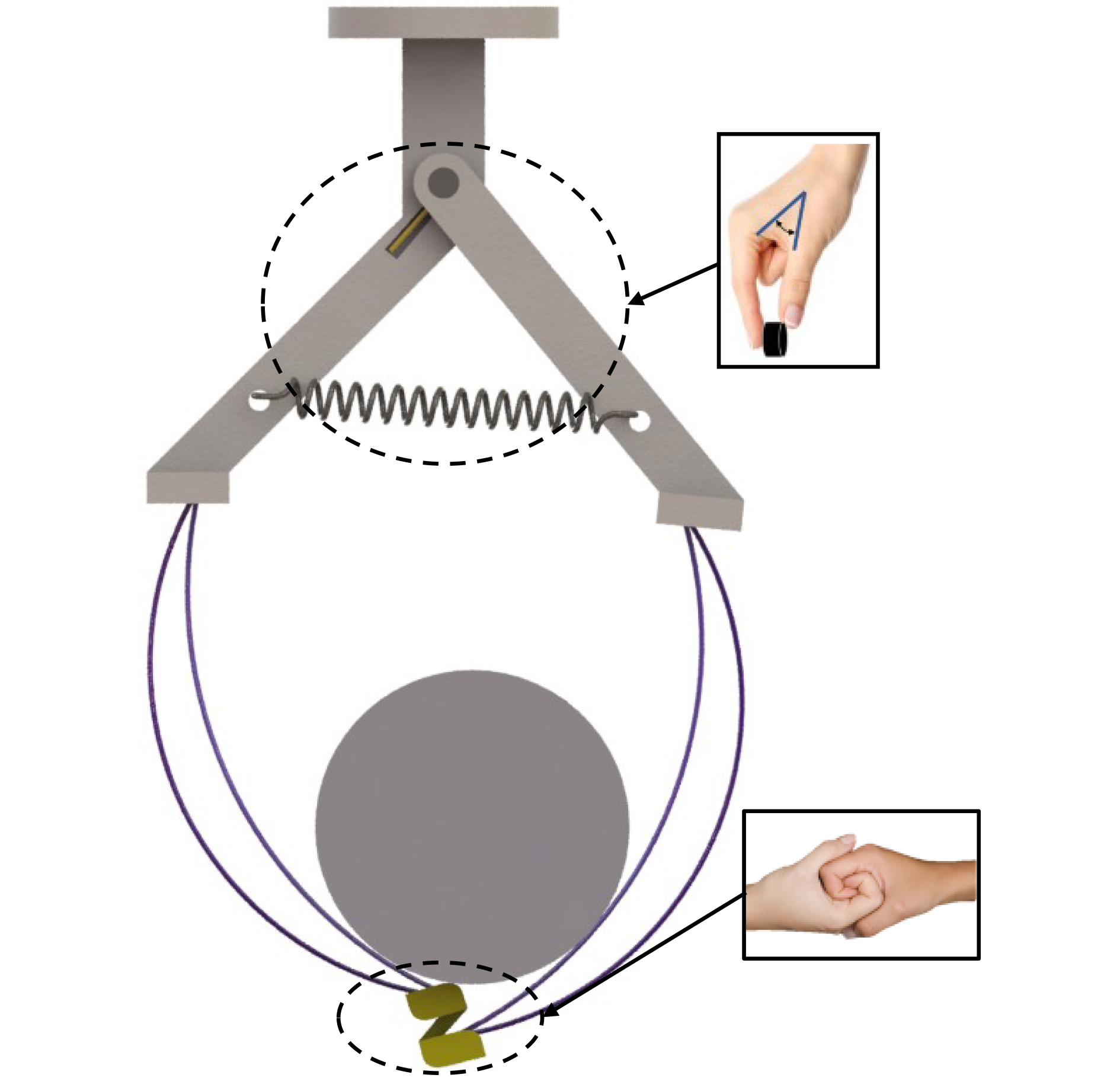
The limited length shrinkage of shape memory alloy (SMA) wire seriously limits the motion range of SMA-based gripper. In this paper, a new soft finger without silicone gel was designed based on pre bent SMA wire, and the finger was back to its original shape by heating SMA wire, rather than relying only on heat exchange with the environment. Through imitating palm movement, a structure with adjustable spacing between fingers was made using SMA spring and rigid spring. The hook structure design at the fingertip can form self-locking to further improve the load capacity of gripper. Through the long thin rod model, the relationship of the initial pre bent angle on the bending angle and output force of the finger was analyzed. The stress-strain model of SMA spring was established for the selection of rigid spring. Three grasping modes were proposed to adapt to the weight of the objects. Through the test of the gripper, it was proved that the gripper had large bending amplitude, bending force, and response rate. The design provides a new idea for the lightweight design and convenient design of soft gripper based on SMA.
Temperature at the finish of austenite transformation
As
Temperature at the start of austenite transformation
D
Outer diameter of SMA spring
E
Young’s modulus
E(ρ)
The second type of complete elliptic integral
F
Force of SMA spring
Fcr
Critical load
Fe
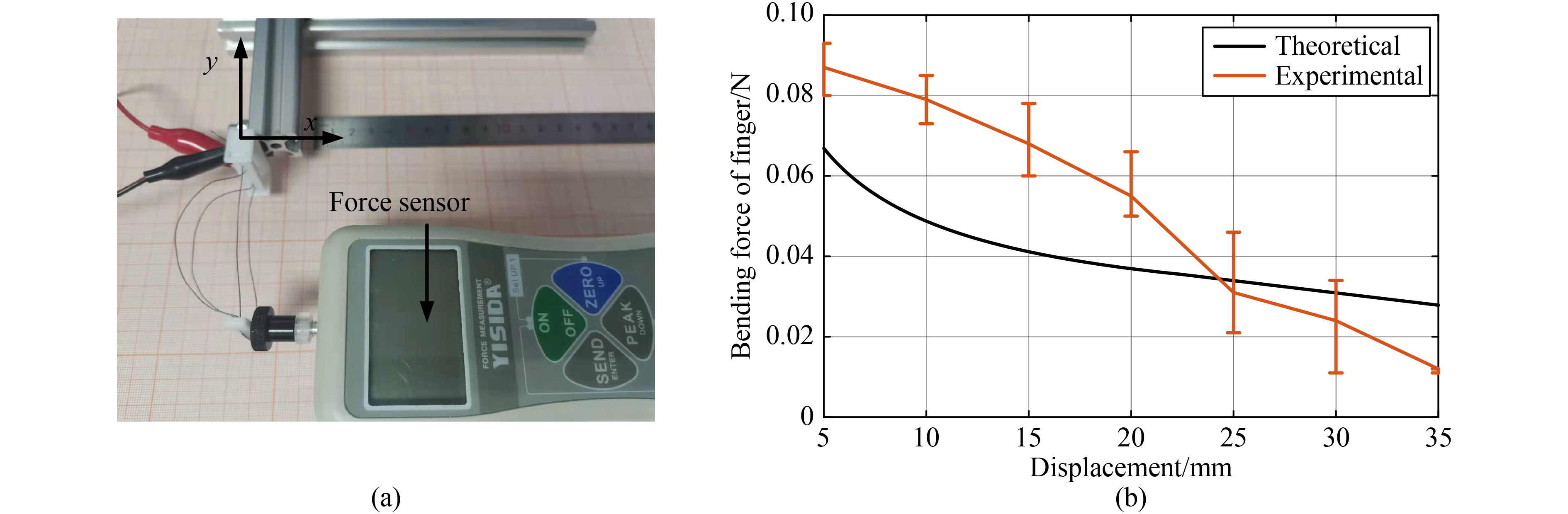
Fingertip force
I
Moment of inertia
K(ρ)
The first type of complete elliptic integral
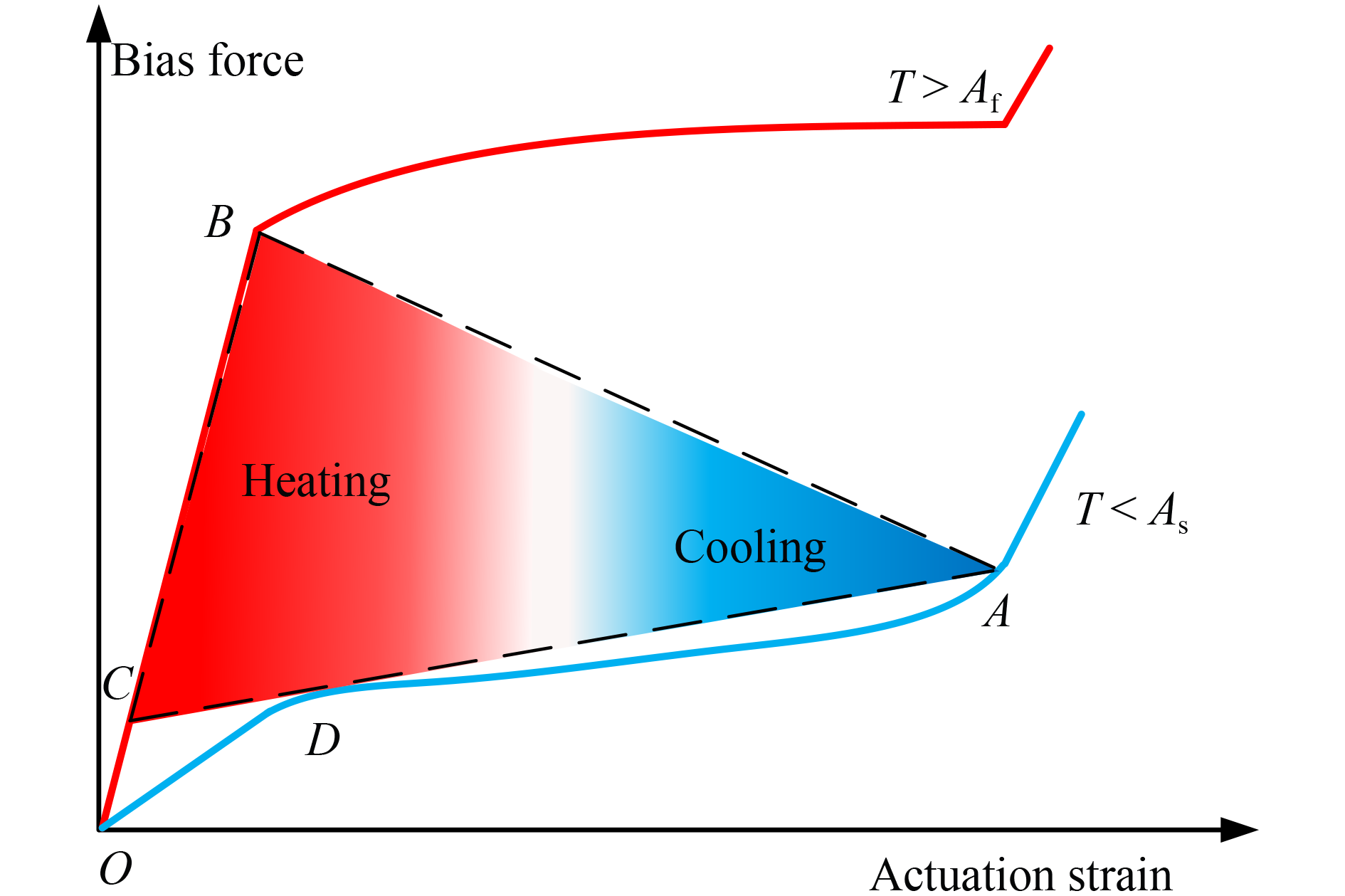
kAB
Slope of line
kCA
Slope of line
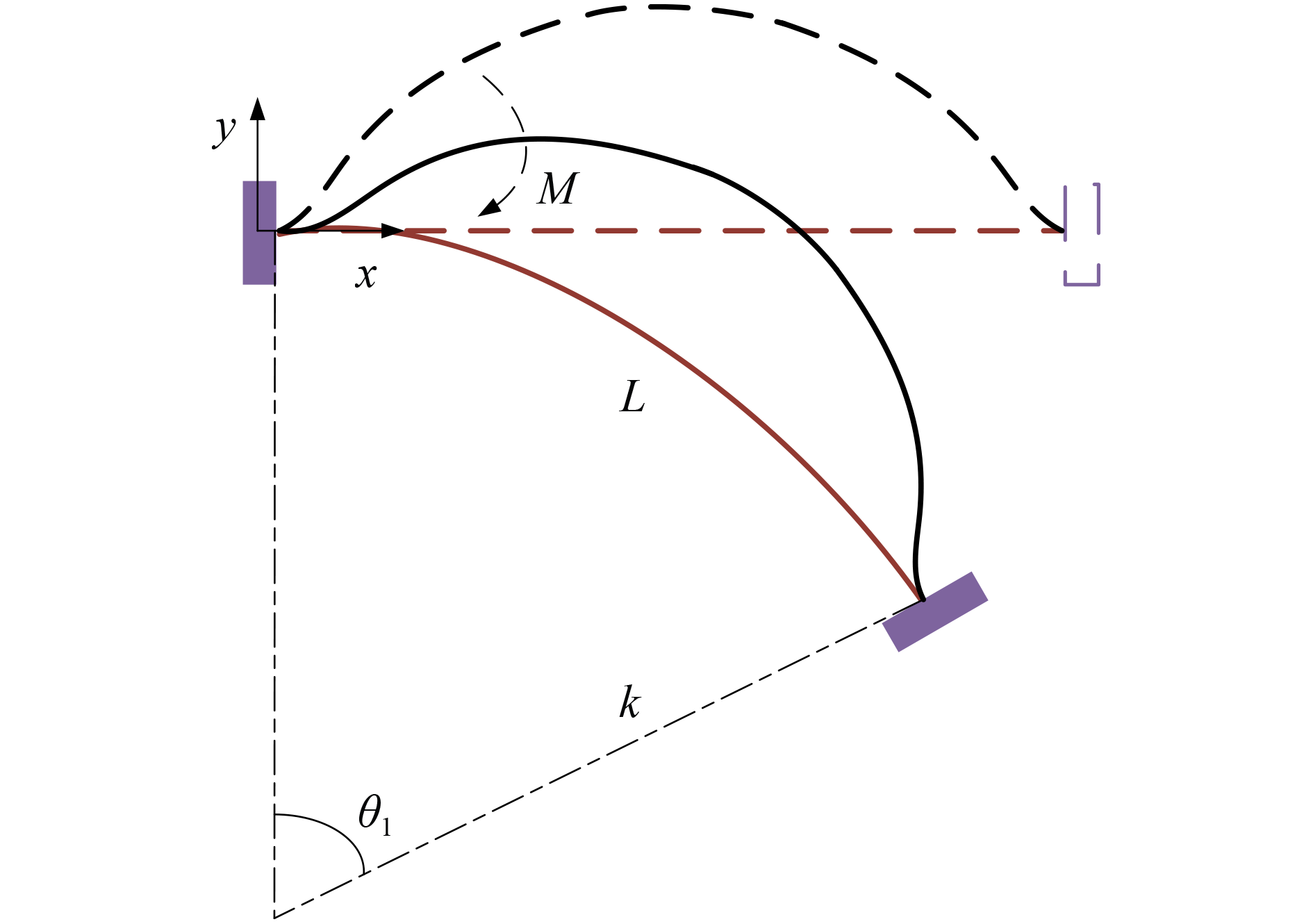
L
Length of the straight SMA wire
l
Length of the pre bent SMA wire
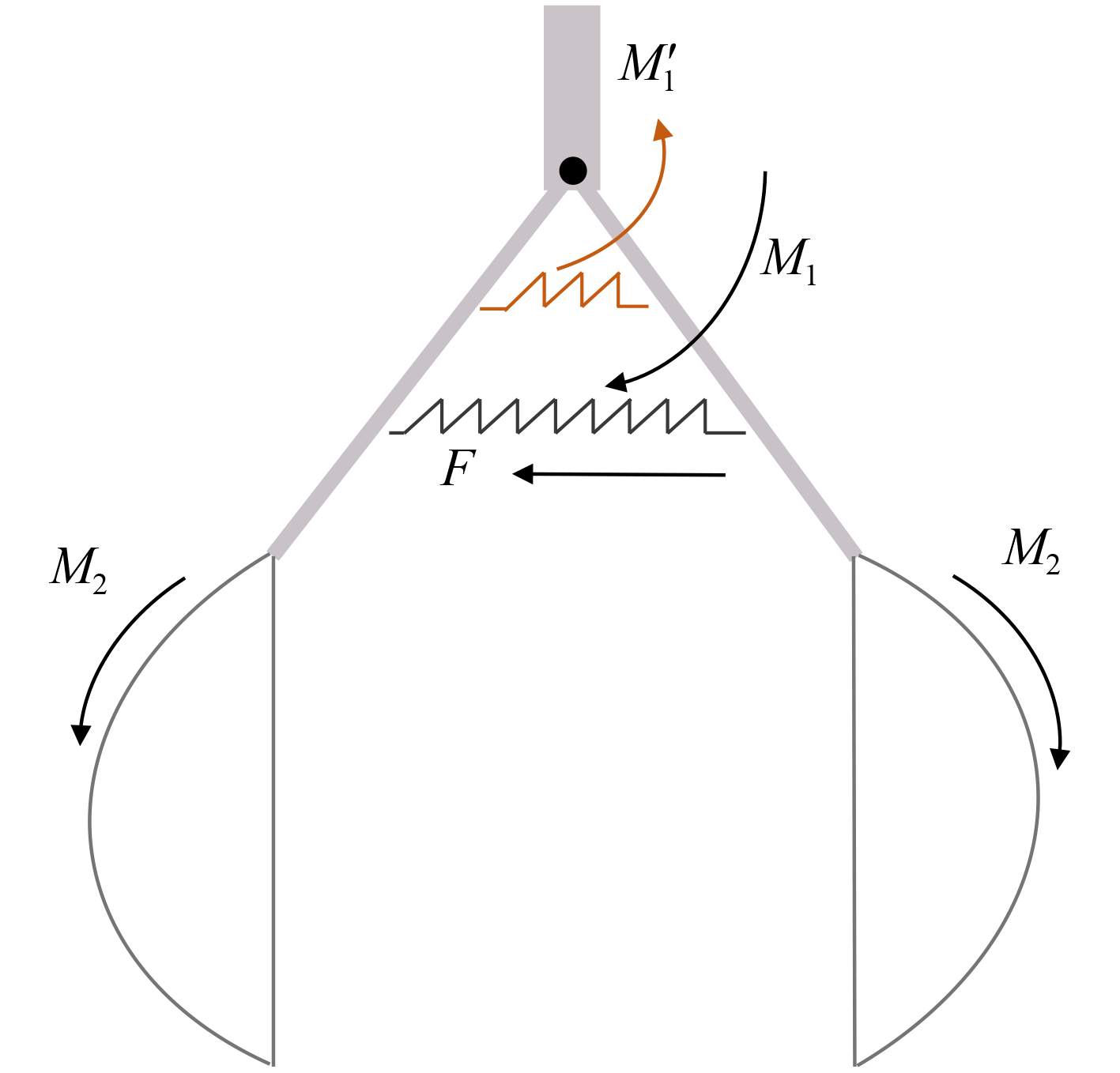
M
Torque of the elastic rod
M1
Torque of the rigid skeleton
M2
Torque of the finger
Msma1
Torque of the pre bent SMA wire
Msma2
Torque of the straight SMA wire
r
Wire diameter of SMA spring
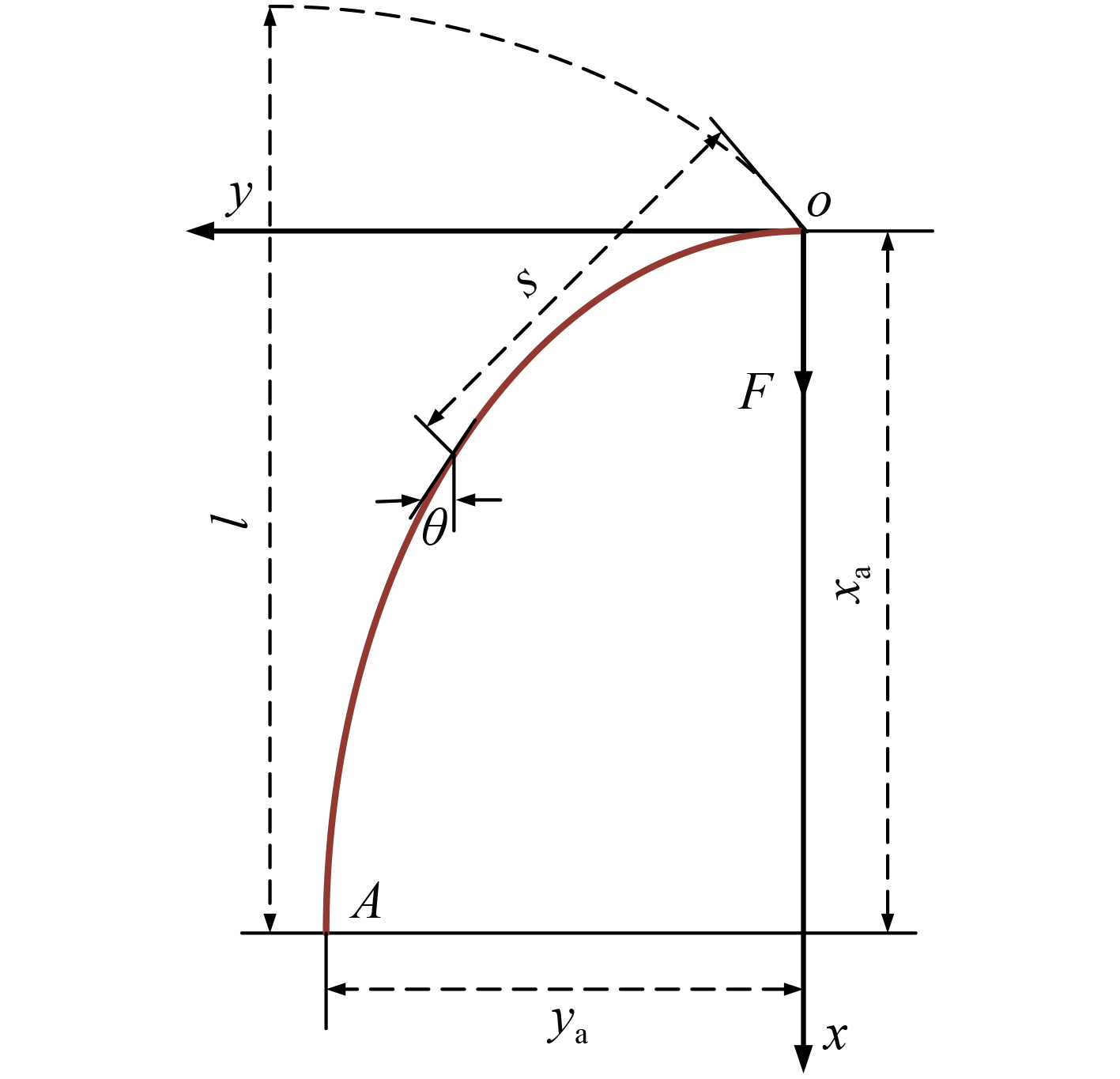
s
Arc length
T
Temperature
xa
x axis displacement generated by the free end of the SMA wire
xe
x axis displacement of the finger
y
Displacement of the elastic rod along the y axis
ya
y axis displacement generated by the free end of the SMA wire
ye
y axis displacement of the finger
ρ1
Bending curvature
θ
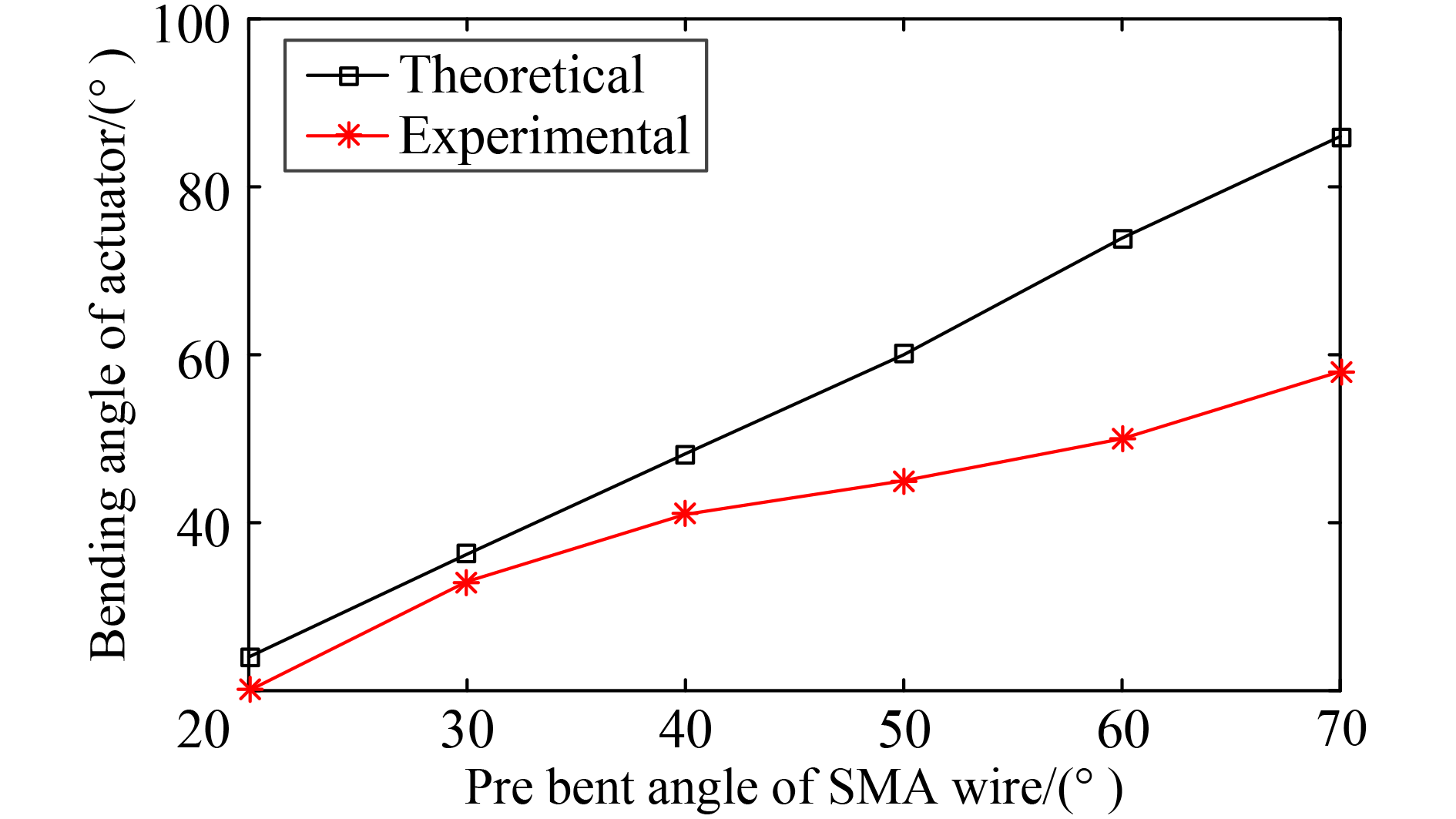
Bending angle of the pre bent SMA wire
θ1
Bending angle of the finger
1
J Shintake , V Cacucciolo , D Floreano , H Shea . Soft robotic grippers. Advanced Materials, 2018, 30(29): 1707035 https://doi.org/10.1002/adma.201707035
2
E Brown , N Rodenberg , J Amend , A Mozeika , E Steltz , M R Zakin , H Lipson , H M Jaeger . Universal robotic gripper based on the jamming of granular material. Proceedings of the National Academy of Sciences of the United States of America, 2010, 107(44): 18809–18814 https://doi.org/10.1073/pnas.1003250107
3
G P Jung , J S Koh , K J Cho . Underactuated adaptive gripper using flexural buckling. IEEE Transactions on Robotics, 2013, 29(6): 1396–1407 https://doi.org/10.1109/TRO.2013.2273842
4
X J Qian , Q M Chen , Y Yang , Y S Xu , Z Li , Z H Wang , Y H Wu , Y Wei , Y Ji . Untethered recyclable tubular actuators with versatile locomotion for soft continuum robots. Advanced Materials, 2018, 30(29): 1801103 https://doi.org/10.1002/adma.201801103
5
C Laschi , M Cianchetti , B Mazzolai , L Margheri , M Follador , P Dario . Soft robot arm inspired by the octopus. Advanced Robotics, 2012, 26(7): 709–727 https://doi.org/10.1163/156855312X626343
6
Z X Xie , A G Domel , N An , C Green , Z Y Gong , T M Wang , E M Knubben , J C Weaver , K Bertoldi , L Wen . Octopus arm-inspired tapered soft actuators with suckers for improved grasping. Soft Robotics, 2020, 7(5): 639–648 https://doi.org/10.1089/soro.2019.0082
7
P Glick , S A Suresh , D Ruffatto , M Cutkosky , M T Tolley , A Parness . A soft robotic gripper with gecko-inspired adhesive. IEEE Robotics and Automation Letters, 2018, 3(2): 903–910 https://doi.org/10.1109/LRA.2018.2792688
8
F Ilievski , A D Mazzeo , R F Shepherd , X Chen , G M Whitesides . Soft robotics for chemists. Angewandte Chemie International Edition, 2011, 50(8): 1890–1895 https://doi.org/10.1002/anie.201006464
9
M Manti , T Hassan , G Passetti , N D’Elia , C Laschi , M Cianchetti . A bioinspired soft robotic gripper for adaptable and effective grasping. Soft Robotics, 2015, 2(3): 107–116 https://doi.org/10.1089/soro.2015.0009
10
E T Roche , R Wohlfarth , J T B Overvelde , N V Vasilyev , F A Pigula , D J Mooney , K Bertoldi , C J Walsh . A bioinspired soft actuated material. Advanced Materials, 2014, 26(8): 1200–1206 https://doi.org/10.1002/adma.201304018
11
S G Li , D M Vogt , D Rus , R J Wood . Fluid-driven origami-inspired artificial muscles. Proceedings of the National Academy of Sciences of the United States of America, 2017, 114(50): 13132–13137 https://doi.org/10.1073/pnas.1713450114
12
M Martens , I Boblan . Modeling the static force of a festo pneumatic muscle actuator: a new approach and a comparison to existing models. Actuators, 2017, 6(4): 33 https://doi.org/10.3390/act6040033
R K Jain , S Datta , S Majumder . Design and control of an IPMC artificial muscle finger for micro gripper using EMG signal. Mechatronics, 2013, 23(3): 381–394 https://doi.org/10.1016/j.mechatronics.2013.02.008
15
Q M Sun , J Z Han , H Li , S Liu , S N Shen , Y F Zhang , J Z Sheng . A miniature robotic turtle with target tracking and wireless charging systems based on IPMCs. IEEE Access, 2020, 8: 187156–187164 https://doi.org/10.1109/ACCESS.2020.3026333
16
Y Z Wang , U Gupta , N Parulekar , J Zhu . A soft gripper of fast speed and low energy consumption. Science China Technological Sciences, 2019, 62(1): 31–38 https://doi.org/10.1007/s11431-018-9358-2
17
G R Li , X P Chen , F H Zhou , Y M Liang , Y H Xiao , X N Cao , Z Zhang , M Q Zhang , B S Wu , S Y Yin , Y Xu , H B Fan , Z Chen , W Song , W J Yang , B B Pan , J Y Hou , W F Zou , S P He , X X Yang , G Y Mao , Z Jia , H F Zhou , T F Li , S X Qu , Z B Xu , Z L Huang , Y W Luo , T Xie , J Gu , S Q Zhu , W Yang . Self-powered soft robot in the Mariana Trench. Nature, 2021, 591(7878): 66–71 https://doi.org/10.1038/s41586-020-03153-z
18
N Kellaris , V Gopaluni Venkata , G M Smith , S K Mitchell , C Keplinger . Peano-HASEL actuators: muscle-mimetic, electrohydraulic transducers that linearly contract on activation. Science Robotics, 2018, 3(14): eaar3276 https://doi.org/10.1126/scirobotics.aar3276
19
F Gao , Z L Wang , Y K Wang , Y W Wang , J Li . A prototype of a biomimetic mantle jet propeller inspired by cuttlefish actuated by SMA wires and a theoretical model for its jet thrust. Journal of Bionics Engineering, 2014, 11(3): 412–422 https://doi.org/10.1016/S1672-6529(14)60054-8
20
A Firouzeh , M Salerno , J Paik . Stiffness control with shape memory polymer in underactuated robotic origamis. IEEE Transactions on Robotics, 2017, 33(4): 765–777 https://doi.org/10.1109/TRO.2017.2692266
21
H Jin , E B Dong , M Xu , C S Liu , G Alici , Y Jie . Soft and smart modular structures actuated by shape memory alloy (SMA) wires as tentacles of soft robots. Smart Materials and Structures, 2016, 25(8): 085026 https://doi.org/10.1088/0964-1726/25/8/085026
22
C H Linghu , S Zhang , C J Wang , K X Yu , C L Li , Y J Zeng , H D Zhu , X H Jin , Z Y You , J Z Song . Universal SMP gripper with massive and selective capabilities for multiscaled, arbitrarily shaped objects. Science Advances, 2020, 6(7): eaay5120 https://doi.org/10.1126/sciadv.aay5120
23
S Y Zhuo , Z G Zhao , Z X Xie , Y F Hao , Y C Xu , T Y Zhao , H J Li , E M Knubben , L Wen , L Jiang , M J Liu . Complex multiphase organohydrogels with programmable mechanics toward adaptive soft-matter machines. Science Advances, 2020, 6(5): eaax1464 https://doi.org/10.1126/sciadv.aax1464
24
S Zhang , X X Ke , Q Jiang , H Ding , Z G Wu . Programmable and reprocessable multifunctional elastomeric sheets for soft origami robots. Science Robotics, 2021, 6(53): eabd6107 https://doi.org/10.1126/scirobotics.abd6107
25
H Z Wang , S Chen , H W Li , X Z Chen , J S Cheng , Y L Shao , C L Zhang , J Zhang , L L Fan , H Chang , R Guo , X L Wang , N Li , L Hu , Y Wei , J Liu . A liquid gripper based on phase transitional metallic ferrofluid. Advanced Functional Materials, 2021, 31(32): 2100274 https://doi.org/10.1002/adfm.202100274
26
S K Nah , Z W Zhong . A microgripper using piezoelectric actuation for micro-object manipulation. Sensors and Actuators A: Physical, 2007, 133(1): 218–224 https://doi.org/10.1016/j.sna.2006.03.014
27
J Kim , J W Kim , H C Kim , L D Zhai , H U Ko , R M Muthoka . Review of soft actuator materials. International Journal of Precision Engineering and Manufacturing, 2019, 20(12): 2221–2241 https://doi.org/10.1007/s12541-019-00255-1
28
M F Wang , X Dong , W M Ba , A Mohammad , D Axinte , A Norton . Design, modelling and validation of a novel extra slender continuum robot for in-situ inspection and repair in aeroengine. Robotics and Computer-Integrated Manufacturing, 2021, 67: 102054 https://doi.org/10.1016/j.rcim.2020.102054
29
C H Yang , S N Geng , I Walker , D T Branson , J G Liu , J S Dai , R J Kang . Geometric constraint-based modeling and analysis of a novel continuum robot with shape memory alloy initiated variable stiffness. The International Journal of Robotics Research, 2020, 39(14): 1620–1634 https://doi.org/10.1177/0278364920913929
30
Y F Lu , Z J Xie , J Wang , H B Yue , M Wu , Y W Liu . A novel design of a parallel gripper actuated by a large-stroke shape memory alloy actuator. International Journal of Mechanical Sciences, 2019, 159: 74–80 https://doi.org/10.1016/j.ijmecsci.2019.05.041
31
W Wang , S H Ahn . Shape memory alloy-based soft gripper with variable stiffness for compliant and effective grasping. Soft Robotics, 2017, 4(4): 379–389 https://doi.org/10.1089/soro.2016.0081
32
H B Yin , C Kong , J F Li , G L Yang . Modeling of grasping force for a soft robotic gripper with variable stiffness. Mechanism and Machine Theory, 2018, 128: 254–274 https://doi.org/10.1016/j.mechmachtheory.2018.05.005
33
J H Lee , Y S Chung , H Rodrigue . Application of SMA spring tendons for improved grasping performance. Smart Materials and Structures, 2019, 28(3): 035006 https://doi.org/10.1088/1361-665X/aaf5f4
34
Z Y Shi , J Pan , J W Tian , H Huang , Y R Jiang , S Zeng . An inchworm-inspired crawling robot. Journal of Bionics Engineering, 2019, 16(4): 582–592 https://doi.org/10.1007/s42235-019-0047-y
35
J Pan , Z Y Shi , T M Wang . Variable-model SMA-driven spherical robot. Science China Technological Sciences, 2019, 62(8): 1401–1411 https://doi.org/10.1007/s11431-018-9408-3
36
DYNALLOY. Introduction to FLEXINOL® Actuator Wire. Available from DYNALLOY website, 2022
R S Manning , K A Hoffman . Stability of n-covered circles for elastic rods with constant planar intrinsic curvature. Journal of Elasticity and the Physical Science of Solids, 2001, 62(1): 1–23 https://doi.org/10.1023/A:1010905411426