|
|
|
Shaking-moment balancing of mechanisms with principal vectors and momentum |
V. van der WIJK( ) ) |
| University of Twente-Engineering Technology, Enschede 7500 AE, Netherlands |
|
|
|
|
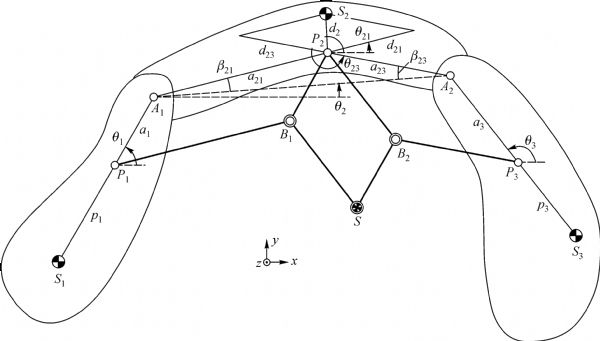
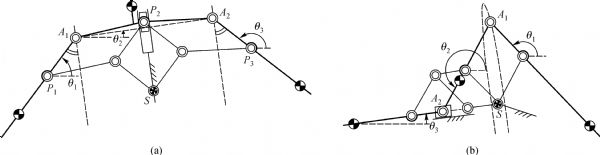
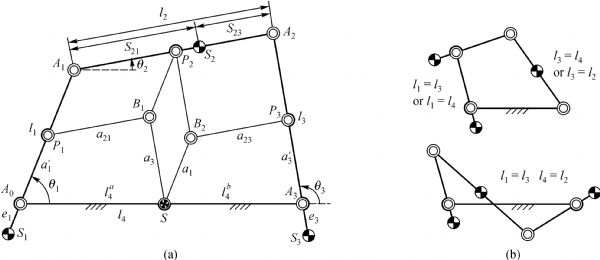
Abstract The design of shaking-moment-balanced linkages still is challenging. Considering moment balance in the very beginning of the design process of mechanisms is important for finding applicable solutions. For this purpose, the method of principal vectors is investigated, showing a compact notation of the angular momentum with respect to the center of mass. The moment balance conditions are derived for three elements in series from which balance solutions are synthesized and illustrated. From the application for moment balancing of a 4R four-bar linkage it is shown that the moment balancing of closed kinematic chains remains challenging.
|
| Keywords
shaking-moment balancing
principal vector linkage
angular momentum
|
|
Corresponding Author(s):
WIJK V. van der,Email:v.vanderwijk@utwente.nl
|
|
Issue Date: 05 March 2013
|
|
| 1 |
van der Wijk V, Herder J L. Guidelines for low mass and low inertia dynamic balancing of mechanisms and robotics. Advances in Robotics Research , 2009, 21–30
|
| 2 |
Kochev I S. General theory of complete shaking moment balancing of planar linkages: a critical review. Mechanism and Machine Theory , 2000, 35(11): 1501–1514
doi: 10.1016/S0094-114X(00)00015-X
|
| 3 |
van der Wijk V, Herder J L, Demeulenaere B. Comparison of various dynamic balancing principles regarding additional mass and additional inertia. Journal of Mechanisms and Robotics , 2009, 1(4): 041006
|
| 4 |
Arakelian V H, Smith M R. Design of planar 3-DOF 3-RRR reactionless parallel manipulators. Mechatronics , 2008, 18(10): 601–606
doi: 10.1016/j.mechatronics.2008.05.002
|
| 5 |
Feng G. Complete shaking force and shaking moment balancing of 26 types of four-, five-, and six-bar linkages with prismatic pairs. Mechanism and Machine Theory , 1990, 25(2): 183–192
doi: 10.1016/0094-114X(90)90120-9
|
| 6 |
Wu Y N, Gosselin C M. Design of reactionless 3-DOF and 6-DOF parallel manipulators using parallelepiped mechanisms. IEEE Transactions on Robotics , 2005, 21(5): 821–833
doi: 10.1109/TRO.2005.847573
|
| 7 |
van der Wijk V, Krut S, Pierrot F, Herder J L. Generic method for deriving the general shaking force balance conditions of parallel manipulators with application to a redundant planar 4-RRR parallel manipulator. In: Proceedings of the 13th World Congress on Mechanism and Machine Science , Guanajuato, Mexico, 2011
|
| 8 |
van der Wijk V, Herder J L. Synthesis method for linkages with center of mass at invariant link point-pantograph based mechanisms. Mechanism and Machine Theory , 2012, 48: 15–28
|
| 9 |
Fischer O. Theoretische grundlagen für eine mechanik der lebenden k?rper. Teubner , Leipzig, 1906
|
| 10 |
van der Wijk V, Herder J L. The work of Otto Fischer and the historical development of his method of principle vectors for mechanism and machine science. Explorations in the History of Machines and Mechanisms , 2012, 521–534
|
| 11 |
van der Wijk V, Herder J L. Inherently balanced 4R four-bar based linkages. Latest Advances in Robot Kinematics , 2012, 309–316
|
| 12 |
Papadopoulos E, Abu-Abed A. Design and motion planning for a zero-reaction manipulator. In: Proceedings of IEEE International Conference on Robotics and Automation , 1994, 1554–1559
|
| 13 |
Ricard R, Gosselin C M. On the development of reactionless parallel manipulators. In: Proceedings of ASME 2000 Design Engineering Technical Conferences and Computers and Information in Engineering Conference , Baltimore, Maryland, 2000
|
| 14 |
Moore B, Schicho J, Gosselin C M. Determination of the complete set of shaking force and shaking moment balanced planar four-bar linkages. Mechanism and Machine Theory , 2009, 44(7): 1338–1347
doi: 10.1016/j.mechmachtheory.2008.10.004
|
| 15 |
Berkof R S, Lowen G G. A new method for completely force balancing simple linkages. Journal of Engineering for Industry , 1969, 91(1): 21–26
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|