|
|
|
Conceptual design and kinematic analysis of a novel parallel robot for high-speed pick-and-place operations |
Qizhi MENG1, Fugui XIE1,2( ), Xin-Jun LIU1,2() ), Xin-Jun LIU1,2() |
1. The State Key Laboratory of Tribology & Institute of Manufacturing Engineering, Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China
2. Beijing Key Laboratory of Precision/Ultra-precision Manufacturing Equipments and Control, Tsinghua University, Beijing 100084, China |
|
|
|
|
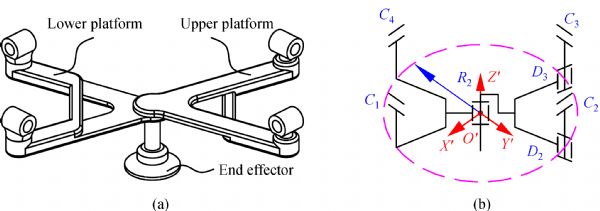
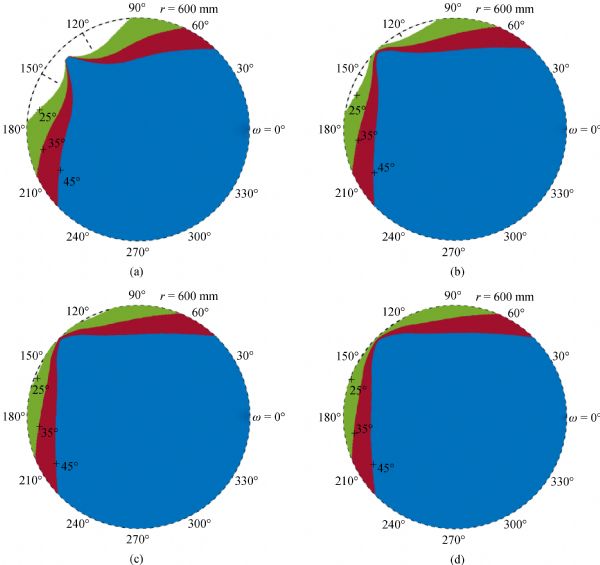
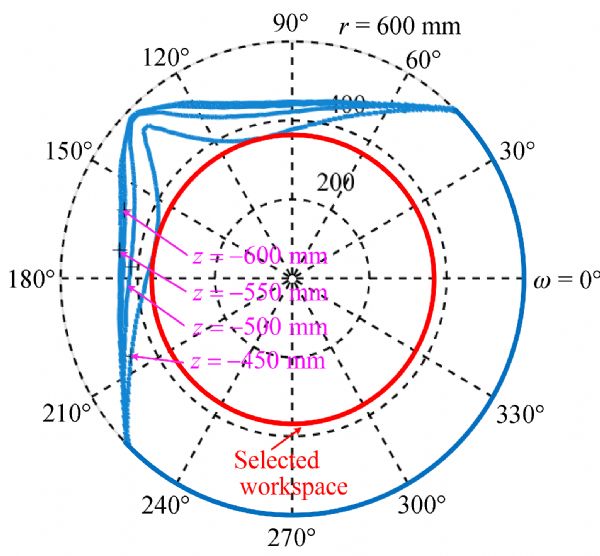
Abstract This paper deals with the conceptual design, kinematic analysis and workspace identification of a novel four degrees-of-freedom (DOFs) high-speed spatial parallel robot for pick-and-place operations. The proposed spatial parallel robot consists of a base, four arms and a 1½ mobile platform. The mobile platform is a major innovation that avoids output singularity and offers the advantages of both single and double platforms. To investigate the characteristics of the robot’s DOFs, a line graph method based on Grassmann line geometry is adopted in mobility analysis. In addition, the inverse kinematics is derived, and the constraint conditions to identify the correct solution are also provided. On the basis of the proposed concept, the workspace of the robot is identified using a set of presupposed parameters by taking input and output transmission index as the performance evaluation criteria.
|
| Keywords
spatial parallel robot
pick-and-place operations
mobility analysis
kinematic modeling
workspace identification
|
|
Corresponding Author(s):
Fugui XIE,Xin-Jun LIU
|
|
Just Accepted Date: 25 September 2017
Online First Date: 06 November 2017
Issue Date: 16 March 2018
|
|
| 1 |
Pierrot F, Company O. H4: A new family of 4-DOF parallel robots. In: Proceedings of 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Atlanta: IEEE, 1999, 508–513
https://doi.org/10.1109/AIM.1999.803222
|
| 2 |
Gosselin C, Isaksson M, Marlow K, et al.. Workspace and sensitivity analysis of a novel nonredundant parallel SCARA robot featuring infinite tool rotation. IEEE Robotics and Automation Letters, 2016, 1(2): 776–783 doi:10.1109/LRA.2016.2527064
|
| 3 |
Urrea C, Kern J. Trajectory tracking control of a real redundant manipulator of the SCARA type. Journal of Electrical Engineering and Technology, 2016, 11(1): 215–226 doi:10.5370/JEET.2016.11.1.215
|
| 4 |
Angeles J, Morozov A, Navarro O. A novel manipulator architecture for the production of SCARA motions. In: Proceedings of IEEE International Conference on Robotics and Automation. San Francisco: IEEE, 2000, 3: 2370–2375
https://doi.org/10.1109/ROBOT.2000.846381
|
| 5 |
Ancuta A, Company O, Pierrot F. Design of Lambda-Quadriglide: A new 4-DOF parallel kinematics mechanism for Schönflies motion. In: Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Quebec: ASME, 2010, 1131–1140
|
| 6 |
Li Q, Herve J M. Parallel mechanisms with bifurcation of Schöenflies motion. IEEE Transactions on Robotics, 2009, 25(1): 158–164 doi:10.1109/TRO.2008.2008737
|
| 7 |
Wu G. Kinematic analysis and optimal design of a wall-mounted four-limb parallel Schönflies-motion robot for pick-and-place operations. Journal of Intelligent & Robotic Systems, 2016, 86(3–4): 663–677
|
| 8 |
Kim S M, Kim W, Yi B J. Kinematic analysis and optimal design of a 3T1R type parallel mechanism. In: Proceedings of IEEE International Conference on Robotics and Automation. Kobe: IEEE, 2009, 2199–2204
|
| 9 |
Li Q C, Xu L M, Chen Q H, et al.. New family of RPR-equivalent parallel mechanisms: Design and application. Chinese Journal of Mechanical Engineering, 2017, 30(2): 217–221
|
| 10 |
Vischer P, Clavel R. Kinematic calibration of the parallel Delta robot. Robotica, 1998, 16(2): 207–218
https://doi.org/10.1017/S0263574798000538
|
| 11 |
Wahle M, Corves B. Stiffness analysis of Clavel’s DELTA robot. In: Proceedings of International Conference on Intelligent Robotics and Applications. Berlin: Springer, 2011, 240–249
|
| 12 |
Clavel R. US Patent, 4976582, 1990-12-11
|
| 13 |
HelloTrade. ABB IRB 340 FlexPicker robots. Retrieved from , 2017-1-25
|
| 14 |
Krut S, Company O, Nabat V, et al.. Heli4: A parallel robot for SCARA motions with a very compact traveling plate and a symmetrical design. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing: IEEE, 2006, 1656–1661
|
| 15 |
Krut S, Nabat V, Company O, et al.. A high-speed parallel robot for SCARA motions. In: Proceedings of IEEE International Conference on Robotics and Automation. New Orleans: IEEE, 2004, 4109–4115
|
| 16 |
Nabat V, Rodriguez M D L O, Company O, et al.. Par4: Very high speed parallel robot for pick-and-place. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Edmonton: IEEE, 2005, 553–558
https://doi.org/10.1109/IROS.2005.1545143
|
| 17 |
Company O, Marquet F, Pierrot F. A new high-speed 4-DOF parallel robot synthesis and modeling issues. IEEE Transactions on Robotics and Automation, 2003, 19(3): 411–420
https://doi.org/10.1109/TRA.2003.810232
|
| 18 |
Pierrot F, Marquet F, Company O, et al.. H4 parallel robot: modeling, design and preliminary experiments. In: Proceedings of IEEE International Conference on Robotics and Automation. Seoul: IEEE, 2001, 3256–3261
|
| 19 |
Choi H B, Company O, Pierrot F, et al.. Design and control of a novel 4-DOFs parallel robot H4. In: Proceedings of IEEE International Conference on Robotics and Automation. Taipei: IEEE, 2003, 1185–1190
|
| 20 |
Choi H B, Company O, Pierrot F, et al.. Design and dynamic simulation of a novel 4-DOF parallel robot H4. Transactions of the Japan Society of Mechanical Engineers, 2004, 70(691): 798–803
https://doi.org/10.1299/kikaic.70.798
|
| 21 |
Xie F G, Liu X J, Zhou Y H. A parallel robot with SCARA motions and its kinematic issues. In: Proceedings of the 3rd IFToMM International Symposium on Robotics and Mechatronics. Singapore: Research Publishing, 2013, 53–62
|
| 22 |
Xie F G, Liu X J. Design and development of a high-speed and high-rotation robot with four identical arms and a single platform. Journal of Mechanisms and Robotics, 2015, 7(4): 041015 doi:10.1115/1.4029440
|
| 23 |
Xie F G, Liu X J, You Z, et al.. Type synthesis of 2T1R-type parallel kinematic mechanisms and the application in manufacturing. Robotics and Computer-integrated Manufacturing, 2014, 30(1): 1–10
https://doi.org/10.1016/j.rcim.2013.07.002
|
| 24 |
Yu J J, Dong X, Pei X, et al.. Mobility and singularity analysis of a class of two degrees of freedom rotational parallel mechanisms using a visual graphic approach. Journal of Mechanisms and Robotics, 2012, 4(4): 041006 doi:10.1115/1.4007410
|
| 25 |
Merlet J P. Singular configurations of parallel manipulators and Grassmann geometry. International Journal of Robotics Research, 1989, 8(5): 194–212
|
| 26 |
Monsarrat B, Gosselin C M. Singularity analysis of a three-leg six-degree-of-freedom parallel platform mechanism based on Grassmann line geometry. International Journal of Robotics Research, 2001, 20(4): 312–328
https://doi.org/10.1177/02783640122067426
|
| 27 |
Blanding D L. Exact Constraint: Machine Design Using Kinematic Processing.New York: ASME Press, 1999
|
| 28 |
Liu X J, Wu C, Wang J S. A new approach for singularity analysis and closeness measurement to singularities of parallel manipulators. Journal of Mechanisms and Robotics, 2012, 4(4): 041001
https://doi.org/10.1115/1.4007004
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|