|
|
|
Terrain classification and adaptive locomotion for a hexapod robot Qingzhui |
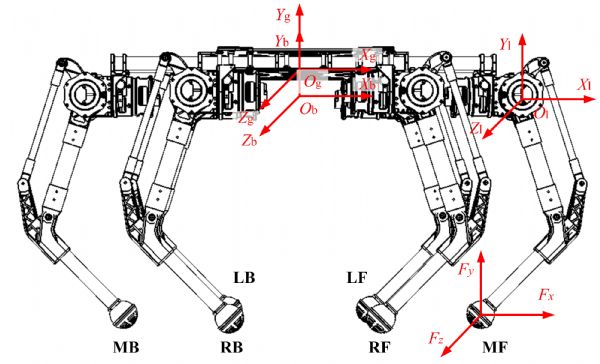
Yue ZHAO, Feng GAO( ), Qiao SUN, Yunpeng YIN ), Qiao SUN, Yunpeng YIN |
| State Key Laboratory of Mechanical System and Vibration, School of Mechanical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China |
|
|
|
|
Abstract Legged robots have potential advantages in mobility compared with wheeled robots in outdoor environments. The knowledge of various ground properties and adaptive locomotion based on different surface materials plays an important role in improving the stability of legged robots. A terrain classification and adaptive locomotion method for a hexapod robot named Qingzhui is proposed in this paper. First, a force-based terrain classification method is suggested. Ground contact force is calculated by collecting joint torques and inertial measurement unit information. Ground substrates are classified with the feature vector extracted from the collected data using the support vector machine algorithm. Then, an adaptive locomotion on different ground properties is proposed. The dynamic alternating tripod trotting gait is developed to control the robot, and the parameters of active compliance control change with the terrain. Finally, the method is integrated on a hexapod robot and tested by real experiments. Our method is shown effective for the hexapod robot to walk on concrete, wood, grass, and foam. The strategies and experimental results can be a valuable reference for other legged robots applied in outdoor environments.
|
| Keywords
terrain classification
hexapod robot
legged robot
adaptive locomotion
gait control
|
|
Corresponding Author(s):
Feng GAO
|
|
Online First Date: 14 May 2021
Issue Date: 15 June 2021
|
|
| 1 |
E Krotkov, D Hackett, L Jackel, et al.. The DARPA robotics challenge finals: Results and perspectives. Journal of Field Robotics, 2017, 34(2): 229–240
https://doi.org/10.1002/rob.21683
|
| 2 |
P Fankhauser, R Diethelm, S Bachmann, et al.. ANYmal at the ARGOS challenge—Tools and experiences from the autonomous inspection of oil & gas sites with a legged robot. In: Preceedings of ROSCon. Seoul, 2016
|
| 3 |
M Raibert, K Blankespoor, G Nelson, et al.. BigDog, the rough-terrain quadruped robot. IFAC Proceedings Volumes, 2008, 41(2): 10822–10825
https://doi.org/10.3182/20080706-5-KR-1001.01833
|
| 4 |
E Ackerman. Boston Dynamics’ SpotMini is all electric, agile, and has a capable face-arm. Available at IEEE Spectrum website, 2016
|
| 5 |
M Hutter, C Gehring, M Bloesch, et al.. StarlETH: A compliant quadrupedal robot for fast, efficient, and versatile locomotion. Adaptive Mobile Robotics, 2012, 483–490
https://doi.org/10.1142/9789814415958_0062
|
| 6 |
C Gehring, S Coros, M Hutter, et al.. Control of dynamic gaits for a quadrupedal robot. In: Proceedings of 2013 IEEE International Conference on Robotics and Automation. Karlsruhe: IEEE, 2013, 3287–3292
https://doi.org/10.1109/ICRA.2013.6631035
|
| 7 |
M Hutter, C Gehring, D Jud, et al.. ANYmal—A highly mobile and dynamic quadrupedal robot. In: Proceedings of 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Daejeon: IEEE, 2016, 38–44
https://doi.org/10.1109/IROS.2016.7758092
|
| 8 |
M Hutter, C Gehring, A Lauber, et al.. ANYmal—Toward legged robots for harsh environments. Advanced Robotics, 2017, 31(17): 918–931
https://doi.org/10.1080/01691864.2017.1378591
|
| 9 |
P Fankhauser, M. Hutter ANYmal: A unique quadruped robot conquering harsh environments. Research Features, 2018, 126: 54–57
https://doi.org/10.3929/ethz-b-000262484
|
| 10 |
G Bledt, M J Powell, B Katz, et al.. MIT Cheetah 3: Design and control of a robust, dynamic quadruped robot. In: Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid: IEEE, 2018, 18372454
https://doi.org/10.1109/IROS.2018.8593885
|
| 11 |
J Di Carlo, P M Wensing, B Katz, et al.. Dynamic locomotion in the MIT Cheetah 3 through convex model-predictive control. In: Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Madrid: IEEE, 2018, 18372957
https://doi.org/10.1109/IROS.2018.8594448
|
| 12 |
Q Nguyen, M J Powell, B Katz, et al.. Optimized jumping on the MIT Cheetah 3 robot. In: Proceedings of 2019 International Conference on Robotics and Automation (ICRA). Montreal: IEEE, 2019, 18903916
https://doi.org/10.1109/ICRA.2019.8794449
|
| 13 |
B Katz, J Di Carlo, S Kim. Mini Cheetah: A platform for pushing the limits of dynamic quadruped control. In: Proceedings of 2019 International Conference on Robotics and Automation (ICRA). Montreal: IEEE, 2019, 18903830
https://doi.org/10.1109/ICRA.2019.8793865
|
| 14 |
C Semini, J Buchli, M Frigerio, et al.. HyQ—A dynamic locomotion research platform. In: Proceedings of International Workshop on Bio-Inspired Robots. Nantes, 2011
|
| 15 |
D Belter, P Skrzypczyński. Rough terrain mapping and classification for foothold selection in a walking robot. Journal of Field Robotics, 2011, 28(4): 497–528
https://doi.org/10.1002/rob.20397
|
| 16 |
D Belter, P Skrzypczyński. Integrated motion planning for a hexapod robot walking on rough terrain. IFAC Proceedings Volumes, 2011, 44(1): 6918–6923
https://doi.org/10.3182/20110828-6-IT-1002.02234
|
| 17 |
X Ding, Z Wang, A Rovetta, et al.. Locomotion analysis of hexapod robot. In: Miripour B, ed. Climbing and Walking Robots. IntechOpen, 2010, 291–310
|
| 18 |
Z Wang, X Ding, A Rovetta, et al.. Mobility analysis of the typical gait of a radial symmetrical six-legged robot. Mechatronics, 2011, 21(7): 1133–1146
https://doi.org/10.1016/j.mechatronics.2011.05.009
|
| 19 |
S Peng, X Ding, F Yang, et al.. Motion planning and implementation for the self-recovery of an overturned multi-legged robot. Robotica, 2017, 35(5): 1107–1120
https://doi.org/10.1017/S0263574715001009
|
| 20 |
Z Chen, F Gao. Time-optimal trajectory planning method for six-legged robots under actuator constraints. Proceedings of the Institution of Mechanical Engineers. Part C, Journal of Mechanical Engineering Science, 2019, 233(14): 4990–5002
https://doi.org/10.1177/0954406219833077
|
| 21 |
Z Chen, F Gao, Q Sun, et al.. Ball-on-plate motion planning for six-parallel-legged robots walking on irregular terrains using pure haptic information. Mechanism and Machine Theory, 2019, 141: 136–150
https://doi.org/10.1016/j.mechmachtheory.2019.07.009
|
| 22 |
Y Tian, F Gao. Efficient motion generation for a six-legged robot walking on irregular terrain via integrated foothold selection and optimization-based whole-body planning. Robotica, 2018, 36(3): 333–352
https://doi.org/10.1017/S0263574717000418
|
| 23 |
Y Tian, F Gao, J Liu, et al.. Step rolling planning of a six-legged robot with 1-DOF waist for slope climbing. Science China. Technological Sciences, 2019, 62(4): 597–607
https://doi.org/10.1007/s11431-017-9216-x
|
| 24 |
Q Sun, F Gao, X Chen. Towards dynamic alternating tripod trotting of a pony-sized hexapod robot for disaster rescuing based on multi-modal impedance control. Robotica, 2018, 36(7): 1048–1076
https://doi.org/10.1017/S026357471800022X
|
| 25 |
P Filitchkin, K Byl. Feature-based terrain classification for LittleDog. In: Proceedings of 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura: IEEE, 2012, 13195379
https://doi.org/10.1109/IROS.2012.6386042
|
| 26 |
A Milella, G Reina, J Underwood. A self-learning framework for statistical ground classification using radar and monocular vision. Journal of Field Robotics, 2015, 32(1): 20–41
https://doi.org/10.1002/rob.21512
|
| 27 |
J Christie, N Kottege. Acoustics based terrain classification for legged robots. In: Proceedings of 2016 IEEE International Conference on Robotics and Automation (ICRA). Stockholm: IEEE, 2016, 16055317
https://doi.org/10.1109/ICRA.2016.7487543
|
| 28 |
C A Brooks, K Iagnemma. Vibration-based terrain classification for planetary exploration rovers. IEEE Transactions on Robotics, 2005, 21(6): 1185–1191
https://doi.org/10.1109/TRO.2005.855994
|
| 29 |
M A Hoepflinger, C D Remy, M Hutter, et al.. Haptic terrain classification for legged robots. 2010 IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010, 11431433
https://doi.org/10.1109/ROBOT.2010.5509309
|
| 30 |
P Giguere, G Dudek, S Saunderson, et al.. Environment identification for a running robot using inertial and actuator cues. Robotics Science and Systems, 2006, 2: 271–278
https://doi.org/10.15607/RSS.2006.II.035
|
| 31 |
J J Shill, E G Collins, E Coyle, et al.. Terrain identification on a one-legged hopping robot using high-resolution pressure images. In: Proceedings of 2014 IEEE International Conference on Robotics and Automation (ICRA). Hong Kong: IEEE, 2014, 14616345
https://doi.org/10.1109/ICRA.2014.6907550
|
| 32 |
X A Wu, T M Huh, R Mukherjee, et al.. Integrated ground reaction force sensing and terrain classification for small legged robots. IEEE Robotics and Automation Letters, 2016, 1(2): 1125–1132
https://doi.org/10.1109/LRA.2016.2524073
|
| 33 |
G Best, P Moghadam, N Kottege, et al.. Terrain classification using a hexapod robot. In: Proceedings of the Australasian Conference on Robotics and Automation. Sydney, 2013
|
| 34 |
M Hoffmann, K Štěpánová, M Reinstein. The effect of motor action and different sensory modalities on terrain classification in a quadruped robot running with multiple gaits. Robotics and Autonomous Systems, 2014, 62(12): 1790–1798
https://doi.org/10.1016/j.robot.2014.07.006
|
| 35 |
K Walas. Terrain classification and negotiation with a walking robot. Journal of Intelligent & Robotic Systems, 2015, 78(3–4): 401–423
https://doi.org/10.1007/s10846-014-0067-0
|
| 36 |
X Li, W Wang, J Yi. Ground substrate classification for adaptive quadruped locomotion. In: Proceedings of 2017 IEEE International Conference on Robotics and Automation (ICRA). Singapore: IEEE, 2017, 17057799
https://doi.org/10.1109/ICRA.2017.7989368
|
| 37 |
X Shao, Y Yang, W Wang. Ground substrates classification and adaptive walking through interaction dynamics for legged robots. Journal of Harbin Institute of Technology, 2012, 19(3): 100–108
https://doi.org/10.11916/j.issn.1005-9113.2012.03.018
|
| 38 |
A Dutta, P Dasgupta. Ensemble learning with weak classifiers for fast and reliable unknown terrain classification using mobile robots. IEEE Transactions on Systems, Man, and Cybernetics. Systems, 2017, 47(11): 2933–2944
https://doi.org/10.1109/TSMC.2016.2531700
|
| 39 |
C Ordonez, J Shill, A Johnson, et al.. Terrain identification for RHex-type robots. In: Proceedings of Unmanned Systems Technology XV. Baltimore, 2013, 87410Q
https://doi.org/10.1117/12.2016169
|
| 40 |
A Valada, W Burgard. Deep spatiotemporal models for robust proprioceptive terrain classification. International Journal of Robotics Research, 2017, 36(13–14): 1521–1539
https://doi.org/10.1177/0278364917727062
|
| 41 |
N Kottege, C Parkinson, P Moghadam, et al.. Energetics-informed hexapod gait transitions across terrains. In: Proceedings of 2015 IEEE International Conference on Robotics and Automation (ICRA). Seattle: IEEE, 2015, 15285932
https://doi.org/10.1109/ICRA.2015.7139915
|
| 42 |
W Bosworth, J Whitney, S Kim, et al.. Robot locomotion on hard and soft ground: Measuring stability and ground properties in-situ. In: Proceedings of 2016 IEEE International Conference on Robotics and Automation (ICRA). Stockholm: IEEE, 2016, 16055370
https://doi.org/10.1109/ICRA.2016.7487541
|
| 43 |
W Duch, N Jankowski, T Maszczyk. Make it cheap: Learning with O(nd) complexity. In: Proceedings of 2012 International Joint Conference on Neural Networks (IJCNN). Brisbane: IEEE, 2012, 12906474
https://doi.org/10.1109/IJCNN.2012.6252380
|
| 44 |
C C Chang, C J Lin. LIBSVM: A library for support vector machines. ACM Transactions on Intelligent Systems and Technology, 2011, 2(3): 27
https://doi.org/10.1145/1961189.1961199
|
| 45 |
C W Hsu, C C Chang, C J Lin. A practical guide to support vector classification, 2003
|
| 46 |
C T Farley, J Glasheen, T A Mcmahon. Running springs: Speed and animal size. Journal of Experimental Biology, 1993, 185(1): 71–86
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|