|
|
|
Bionic soft robotic gripper with feedback control for adaptive grasping and capturing applications |
Tingke WU1,2,3, Zhuyong LIU1,2,3( ), Ziqi MA1,2,3, Boyang WANG1,2, Daolin MA1,2, Hexi YU1,2 ), Ziqi MA1,2,3, Boyang WANG1,2, Daolin MA1,2, Hexi YU1,2 |
1. Department of Engineering Mechanics, School of Ocean and Civil Engineering, Shanghai Jiao Tong University, Shanghai 200240, China
2. State Key Laboratory of Ocean Engineering, Shanghai Jiao Tong University, Shanghai 200240, China
3. MOE Key Laboratory of Hydrodynamics, Shanghai Jiao Tong University, Shanghai 200240, China |
|
|
|
|
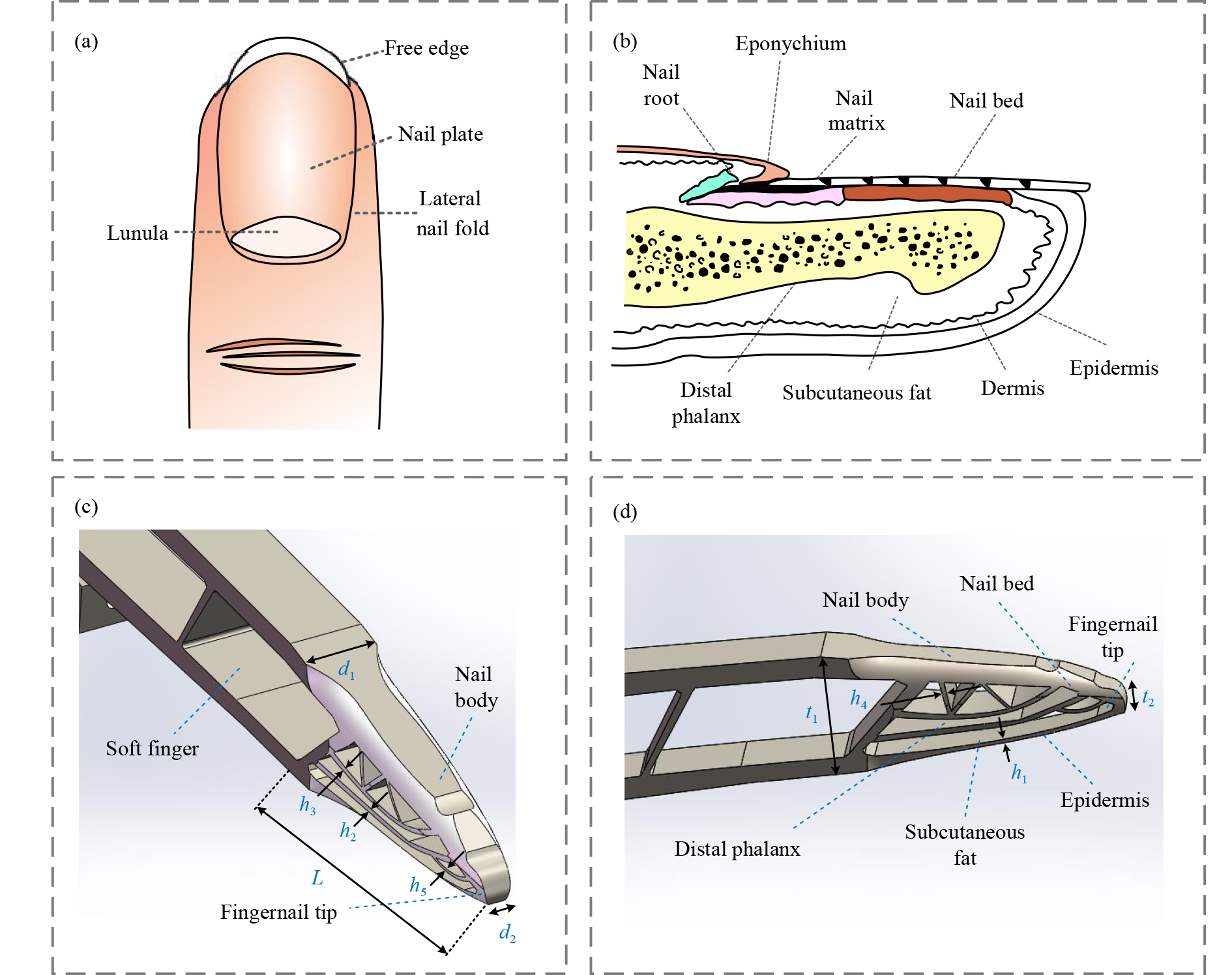
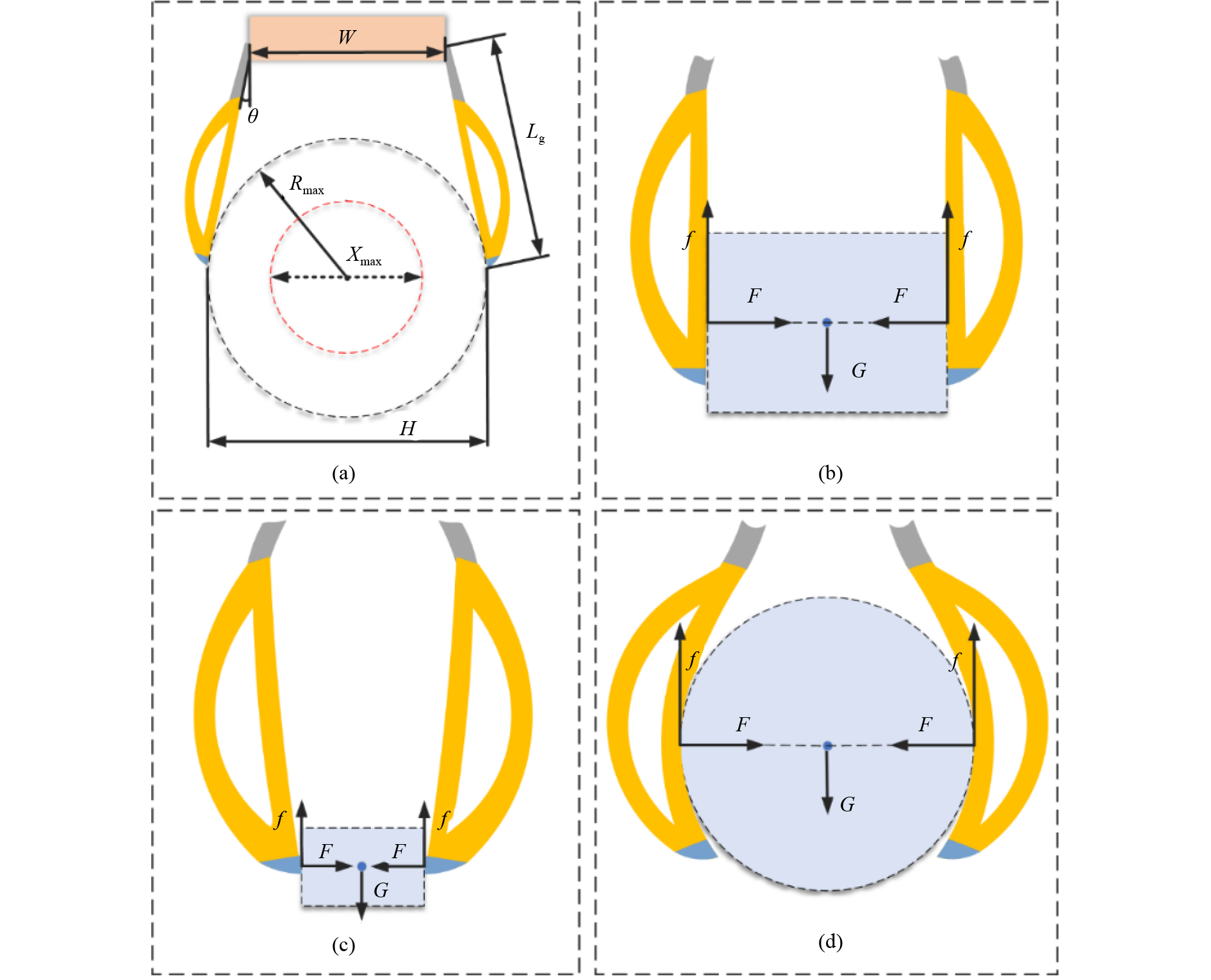
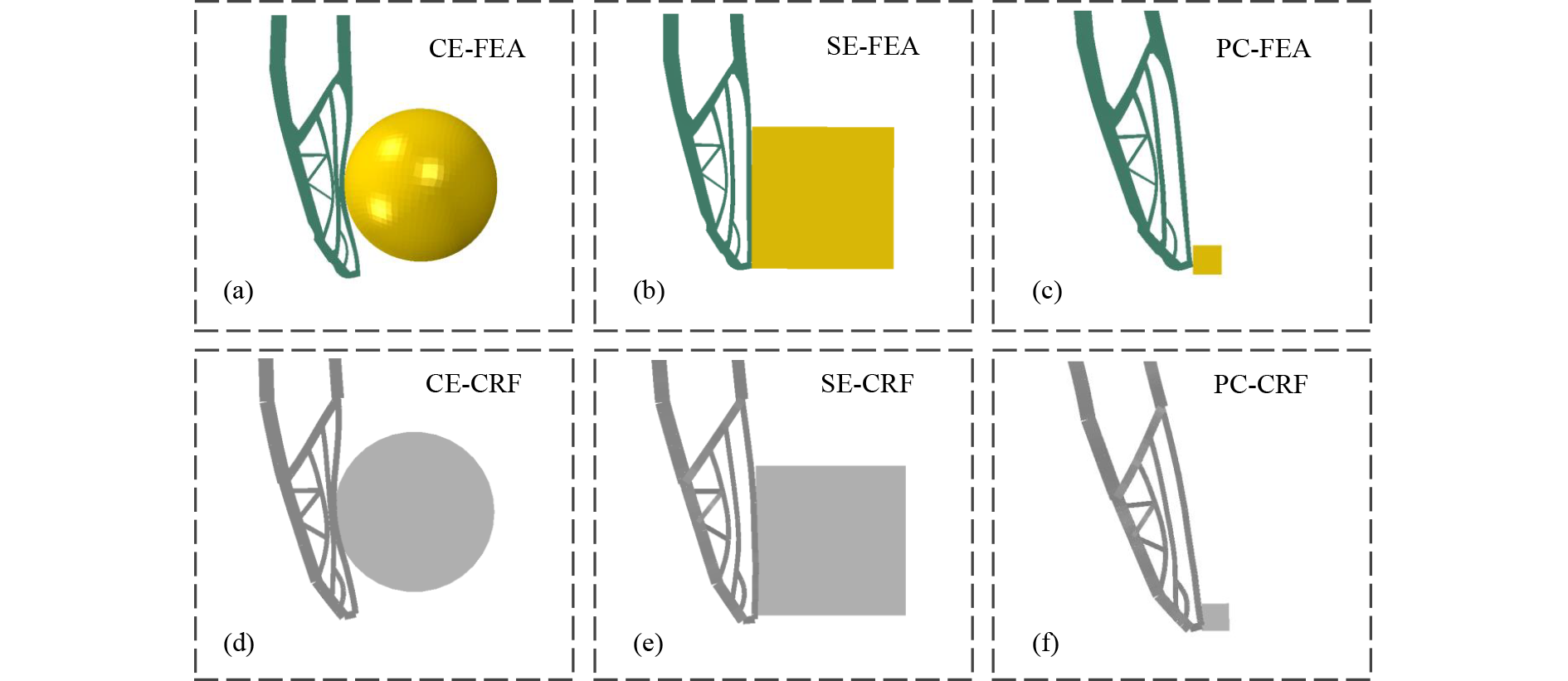
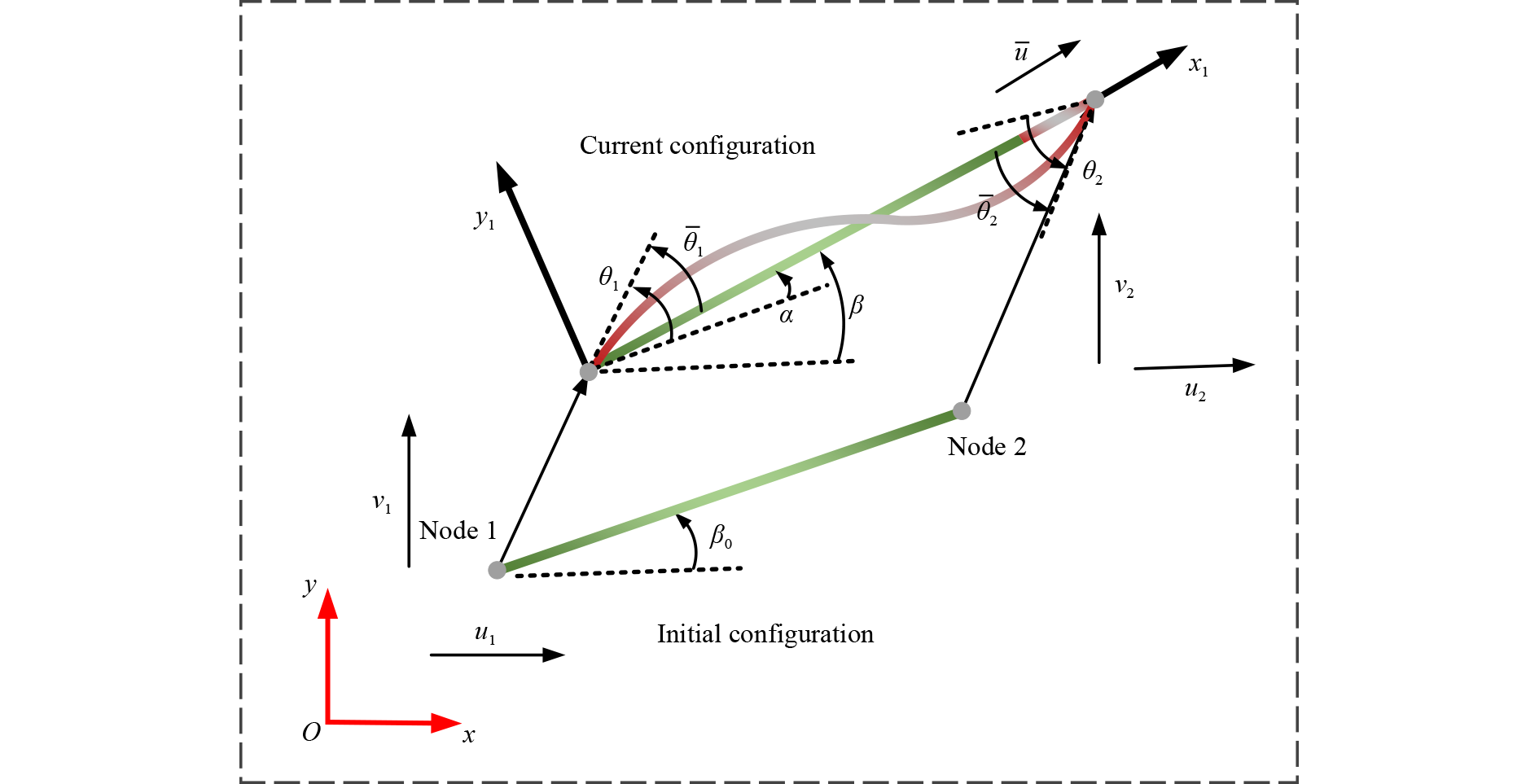
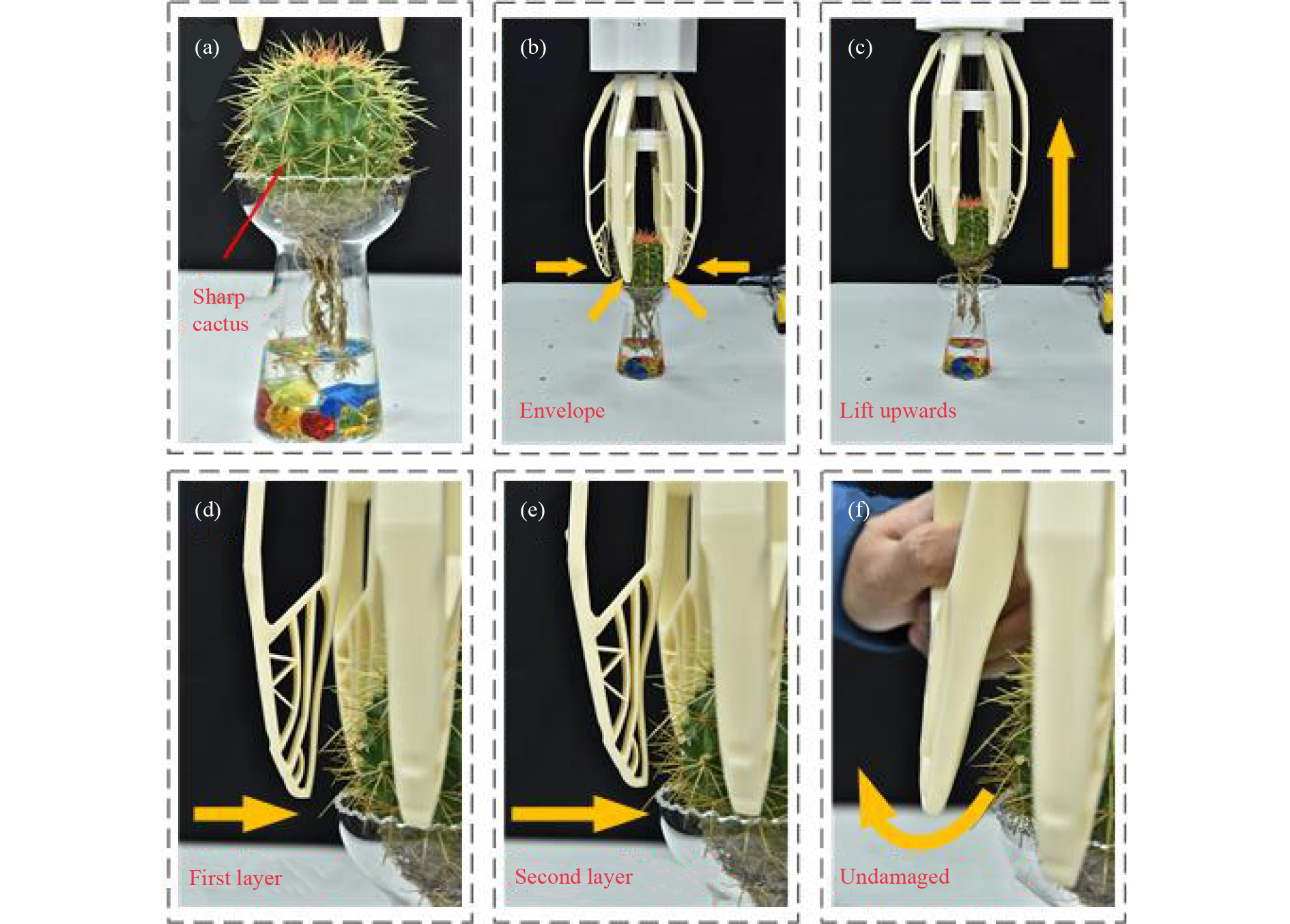
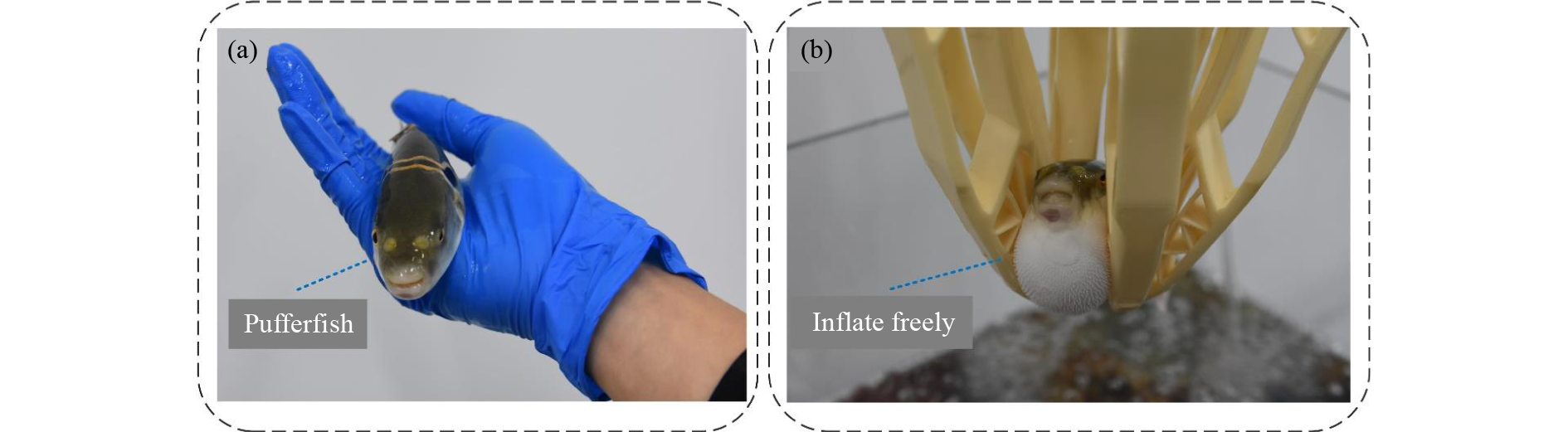
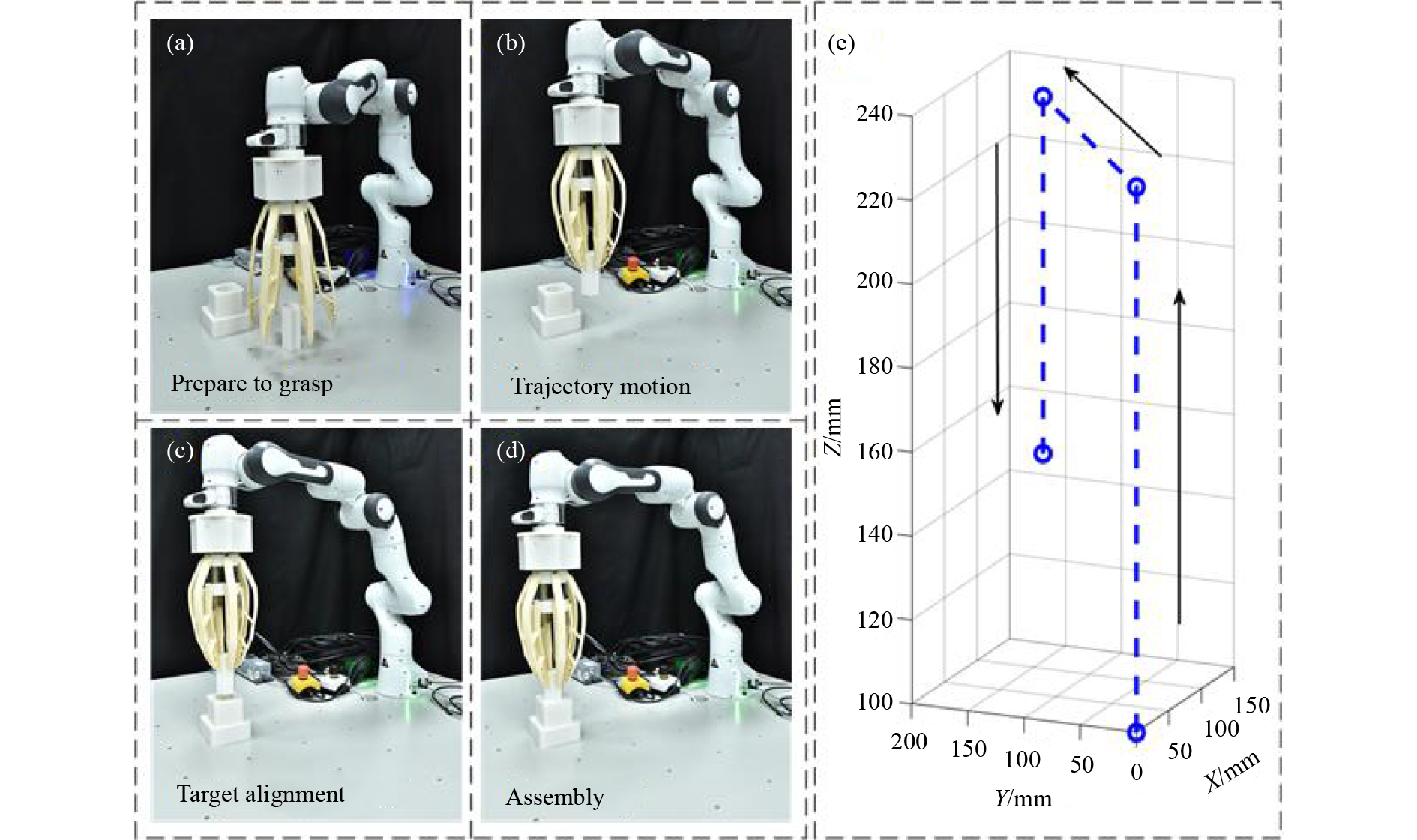
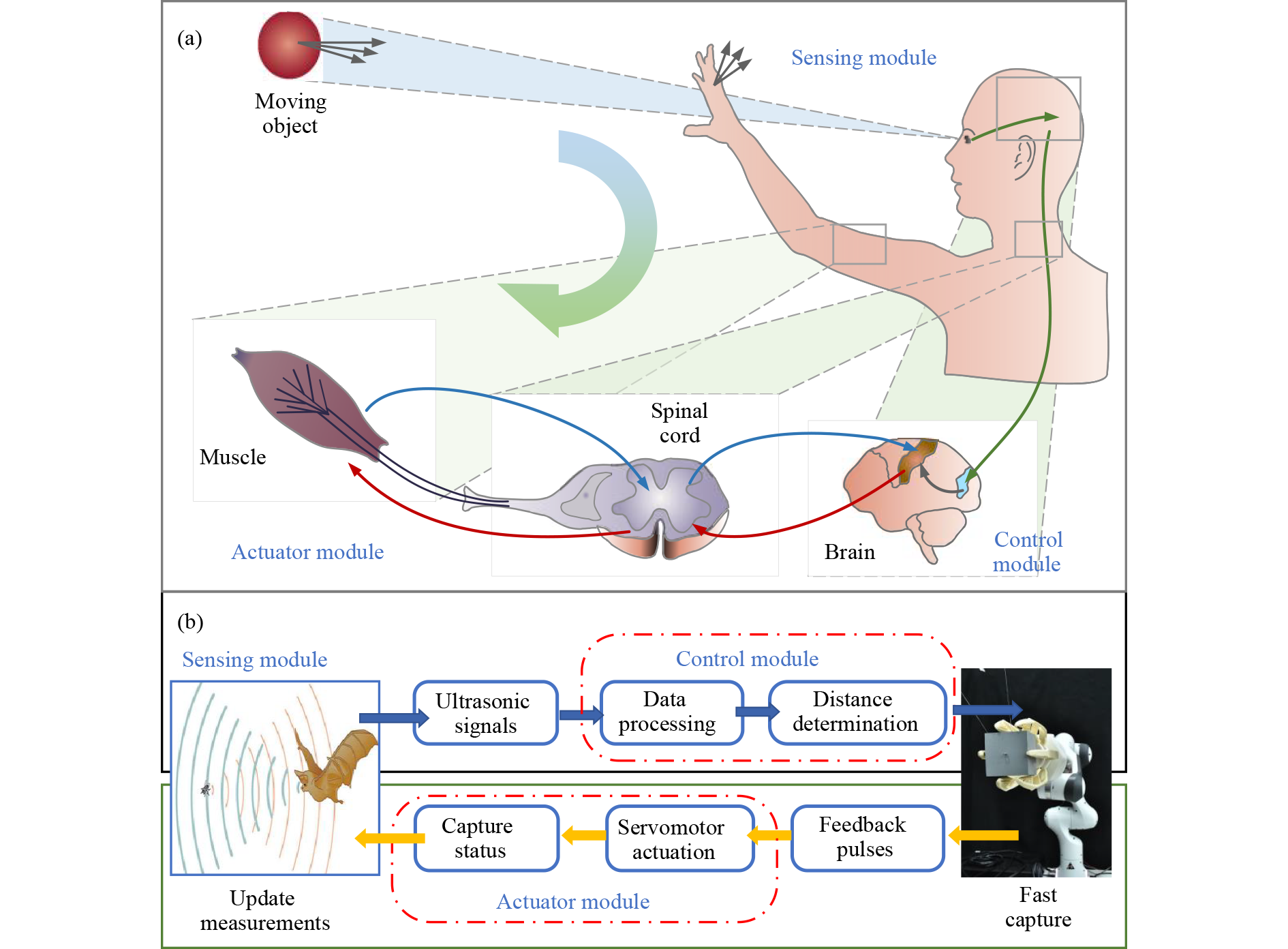
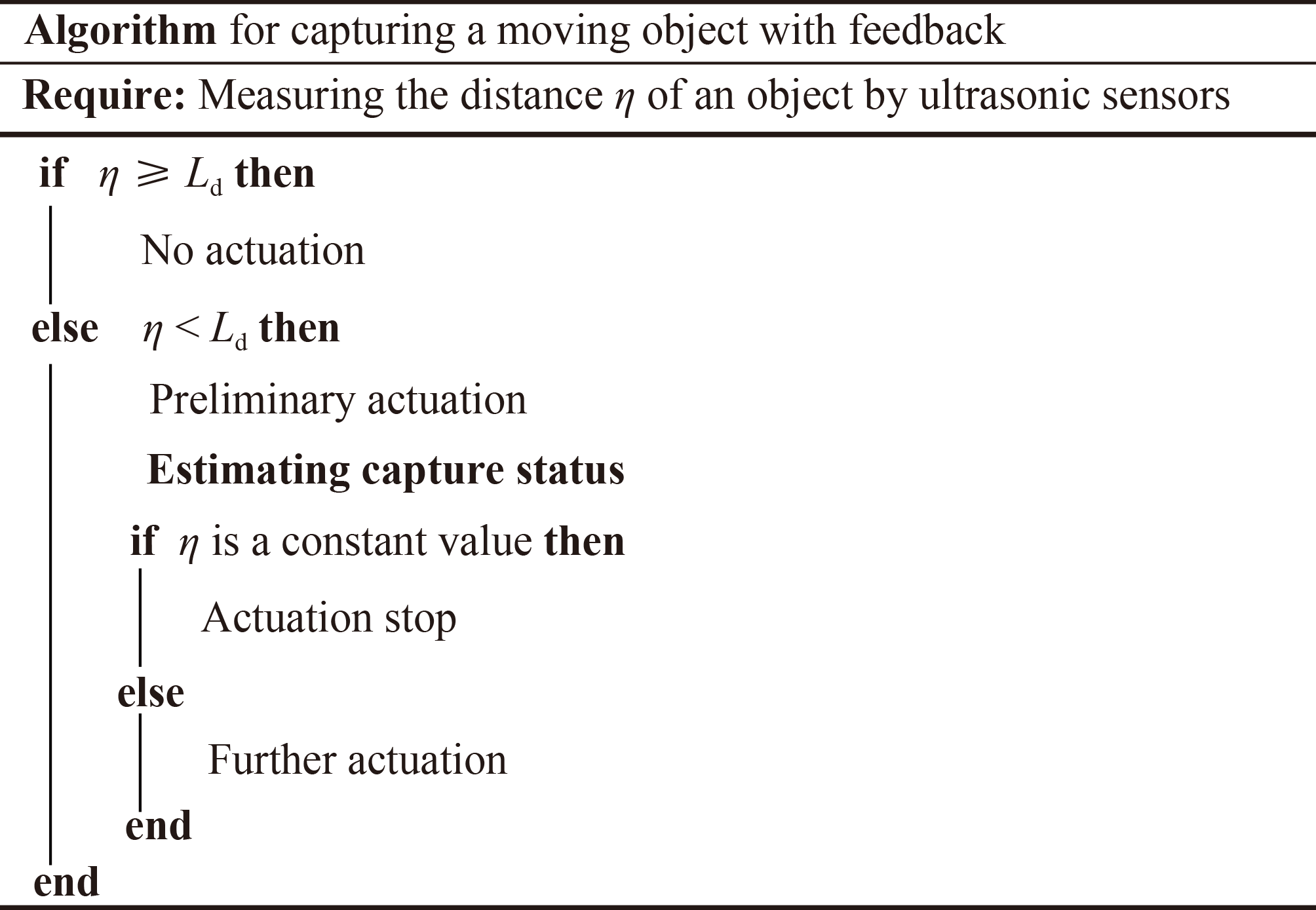
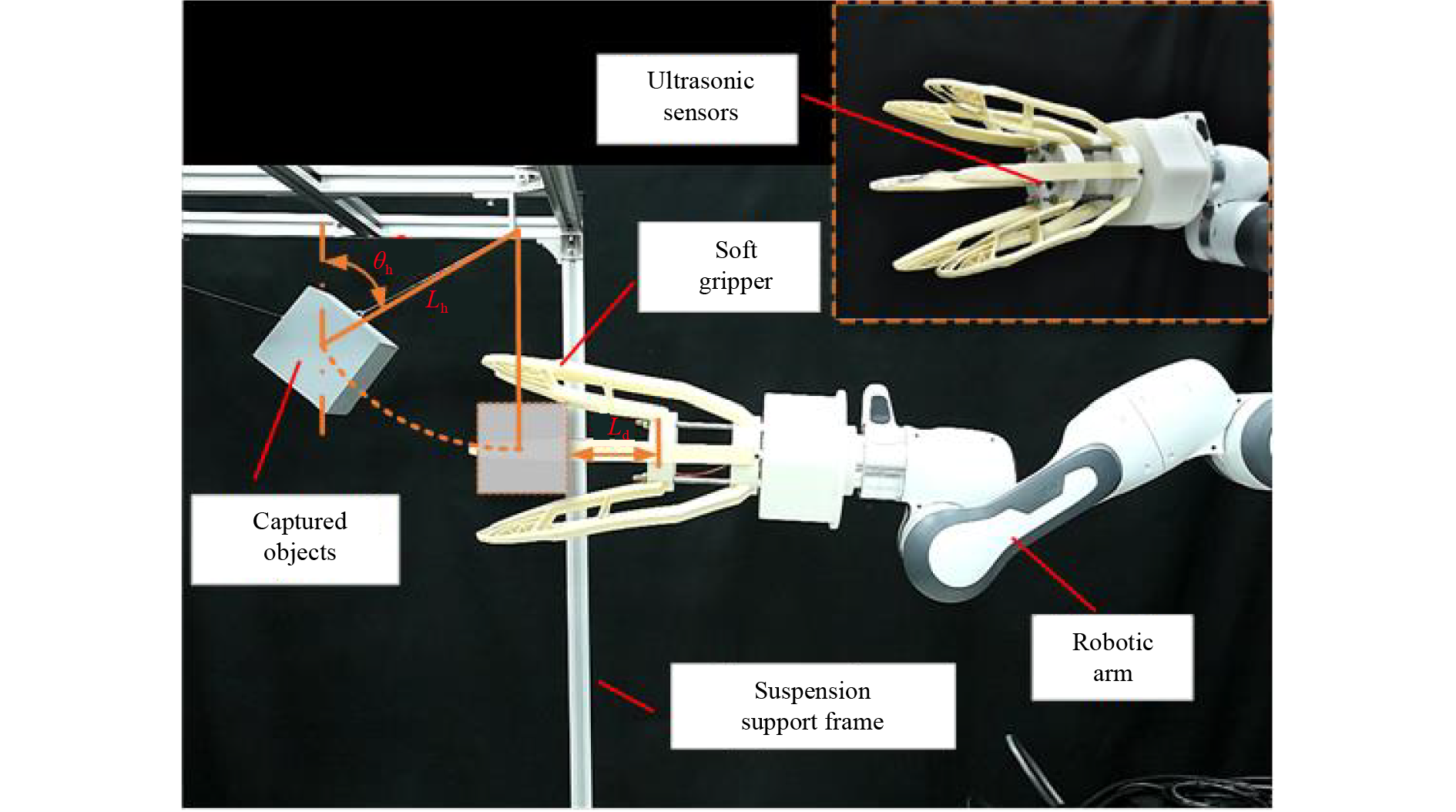
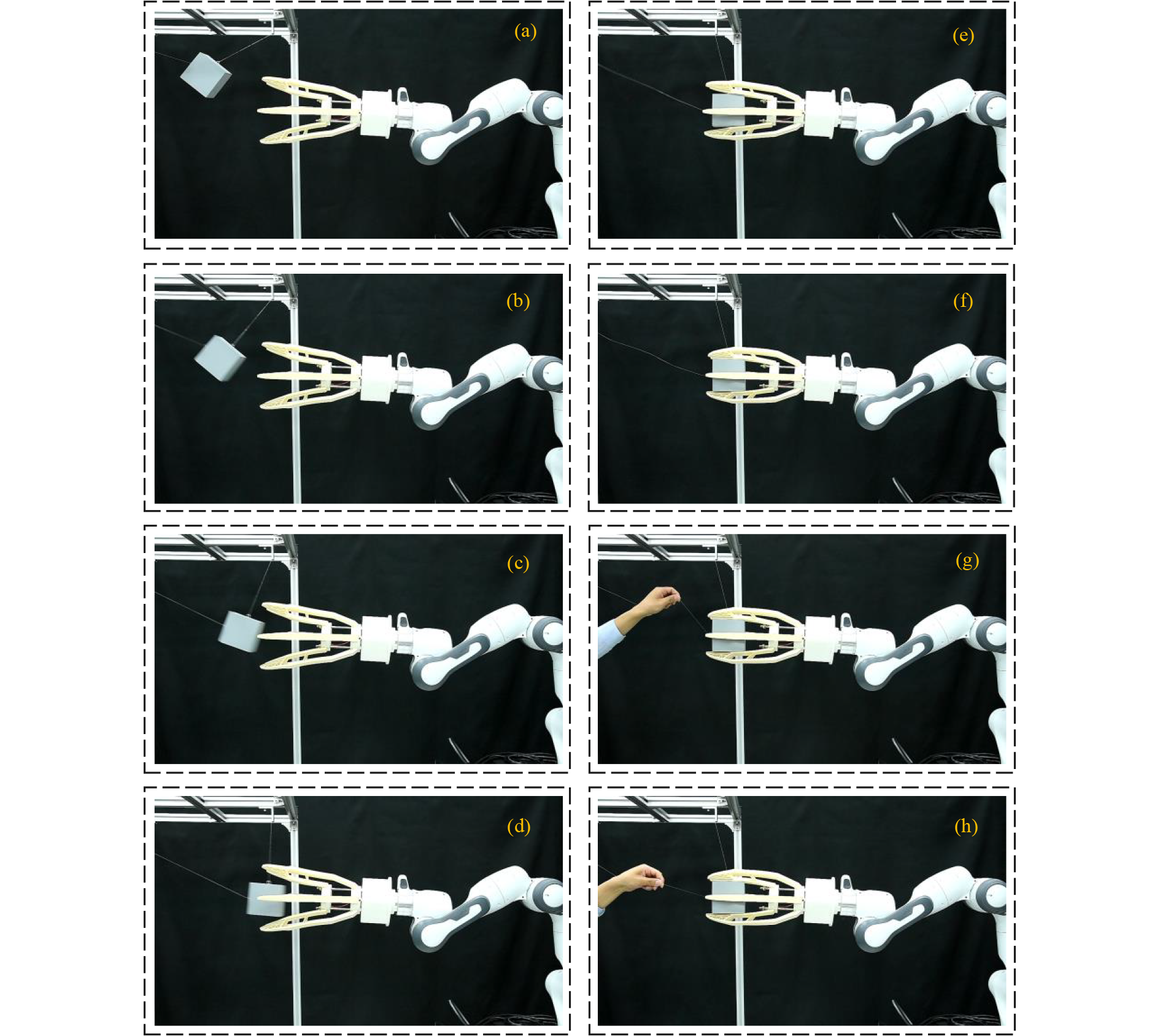
Abstract Robots are playing an increasingly important role in engineering applications. Soft robots have promising applications in several fields due to their inherent advantages of compliance, low density, and soft interactions. A soft gripper based on bio-inspiration is proposed in this study. We analyze the cushioning and energy absorption mechanism of human fingertips in detail and provide insights for designing a soft gripper with a variable stiffness structure. We investigate the grasping modes through a large deformation modeling approach, which is verified through experiments. The characteristics of the three grasping modes are quantified through testing and can provide guidance for robotics manipulation. First, the adaptability of the soft gripper is verified by grasping multi-scale and extremely soft objects. Second, a cushioning model of the soft gripper is proposed, and the effectiveness of cushioning is verified by grasping extremely sharp objects and living organisms. Notably, we validate the advantages of the variable stiffness of the soft gripper, and the results show that the soft robot can robustly complete assemblies with a gap of only 0.1 mm. Owing to the unstructured nature of the engineering environment, the soft gripper can be applied in complex environments based on the abovementioned experimental analysis. Finally, we design the soft robotics system with feedback capture based on the inspiration of human catching behavior. The feasibility of engineering applications is initially verified through fast capture experiments on moving objects. The design concept of this robot can provide new insights for bionic machinery.
|
| Keywords
soft bionic gripper
variable stiffness structure
large deformation modeling
feedback control
soft robotic system
|
|
Corresponding Author(s):
Zhuyong LIU
|
|
Just Accepted Date: 05 January 2024
Issue Date: 07 April 2024
|
|
| 1 |
J H Low, P M Khin, Q Q Han, H C Yao, Y S Teoh, Y D Zeng, S Li, J Liu, Z J Liu, P Valdivia y Alvarado, I M Chen, B C K Tee, R C H Yeow. Sensorized reconfigurable soft robotic gripper system for automated food handling. IEEE/ASME Transactions on Mechatronics, 2022, 27(5): 3232–3243
https://doi.org/10.1109/TMECH.2021.3110277
|
| 2 |
T Hattori, T Omata. Multifunctional parallel gripper with three actuators. IEEE/ASME Transactions on Mechatronics, 2022, 27(3): 1391–1402
https://doi.org/10.1109/TMECH.2021.3093777
|
| 3 |
G Y Gu, N B Zhang, H P Xu, S T Lin, Y Yu, G H Chai, L S Ge, H L Yang, Q W Shao, X J Sheng, X Y Zhu, X H Zhao. A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback. Nature Biomedical Engineering, 2023, 7(4): 589–598
https://doi.org/10.1038/s41551-021-00767-0
|
| 4 |
R Deimel, O Brock. A novel type of compliant and underactuated robotic hand for dexterous grasping. The International Journal of Robotics Research, 2016, 35(1–3): 161–185
https://doi.org/10.1177/0278364915592961
|
| 5 |
A Alian, M Zareinejad, H A Talebi. Curvature tracking of a two-segmented soft finger using an adaptive sliding-mode controller. IEEE/ASME Transactions on Mechatronics, 2023, 28(1): 50–59
https://doi.org/10.1109/TMECH.2022.3210030
|
| 6 |
Y Gao, S Chien. Review on space robotics: toward top-level science through space exploration. Science Robotics, 2017, 2(7): eaan5074
https://doi.org/10.1126/scirobotics.aan5074
|
| 7 |
Y L Sun, Y Q Liu, F Pancheri, T C Lueth. LARG: a lightweight robotic gripper with 3-D topology optimized adaptive fingers. IEEE/ASME Transactions on Mechatronics, 2022, 27(4): 2026–2034
https://doi.org/10.1109/TMECH.2022.3170800
|
| 8 |
Z F Zhou, R Z Zuo, B B Ying, J H Zhu, Y Wang, X Wang, X Y Liu. A sensory soft robotic gripper capable of learning-based object recognition and force-controlled grasping. IEEE Transactions on Automation Science and Engineering, 2024, 21(1): 844–854
https://doi.org/10.1109/TASE.2022.3228255
|
| 9 |
L Xu, H Q Chen, J Zou, W T Dong, G Y Gu, L M Zhu, X Y Zhu. Bio-inspired annelid robot: a dielectric elastomer actuated soft robot. Bioinspiration & Biomimetics, 2017, 12(2): 025003
https://doi.org/10.1088/1748-3190/aa50a5
|
| 10 |
Y Z Wang, U Gupta, N Parulekar, J Zhu. A soft gripper of fast speed and low energy consumption. Science China Technological Sciences, 2019, 62(1): 31–38
https://doi.org/10.1007/s11431-018-9358-2
|
| 11 |
K Luo, Q Tian, H Y Hu. Dynamic modeling, simulation and design of smart membrane systems driven by soft actuators of multilayer dielectric elastomers. Nonlinear Dynamics, 2020, 102(3): 1463–1483
https://doi.org/10.1007/s11071-020-06001-x
|
| 12 |
G Y Gu, J Zou, R K Zhao, X H Zhao, X Y Zhu. Soft wall-climbing robots. Science Robotics, 2018, 3(25): eaat2874
https://doi.org/10.1126/scirobotics.aat2874
|
| 13 |
R F Shepherd, A A Stokes, J Freake, J Barber, P W Snyder, A D Mazzeo, L Cademartiri, S A Morin, G M Whitesides. Using explosions to power a soft robot. Angewandte Chemie International Edition, 2013, 52(10): 2892–2896
https://doi.org/10.1002/anie.201209540
|
| 14 |
N W Bartlett, M T Tolley, J T B Overvelde, J C Weaver, B Mosadegh, K Bertoldi, G M Whitesides, R J Wood. A 3D-printed, functionally graded soft robot powered by combustion. Science, 2015, 349(6244): 161–165
https://doi.org/10.1126/science.aab0129
|
| 15 |
Y F Zhang, D Z Yang, P N Yan, P W Zhou, J Zou, G Y Gu. Inchworm inspired multimodal soft robots with crawling, climbing, and transitioning locomotion. IEEE Transactions on Robotics, 2022, 38(3): 1806–1819
https://doi.org/10.1109/TRO.2021.3115257
|
| 16 |
H K Yap, H Y Ng, C H Yeow. High-force soft printable pneumatics for soft robotic applications. Soft Robotics, 2016, 3(3): 144–158
https://doi.org/10.1089/soro.2016.0030
|
| 17 |
Z X Xie, F Y Yuan, Z M Liu, Z N Sun, E M Knubben, L Wen. A proprioceptive soft tentacle gripper based on crosswise stretchable sensors. IEEE/ASME Transactions on Mechatronics, 2020, 25(4): 1841–1850
https://doi.org/10.1109/TMECH.2020.2993258
|
| 18 |
S F Liu, F J Wang, Z Liu, W Zhang, Y L Tian, D W Zhang. A two-finger soft-robotic gripper with enveloping and pinching grasping modes. IEEE/ASME Transactions on Mechatronics, 2021, 26(1): 146–155
https://doi.org/10.1109/TMECH.2020.3005782
|
| 19 |
C H Liu, L J Chen, J C Chi, J Y Wu. Topology optimization design and experiment of a soft pneumatic bending actuator for grasping applications. IEEE Robotics and Automation Letters, 2022, 7(2): 2086–2093
https://doi.org/10.1109/LRA.2022.3142910
|
| 20 |
G Y Gu, D Wang, L S Ge, X Y Zhu. Analytical modeling and design of generalized PNEU-net soft actuators with three-dimensional deformations. Soft Robotics, 2021, 8(4): 462–477
https://doi.org/10.1089/soro.2020.0039
|
| 21 |
D Drotman, M Ishida, S Jadhav, M T Tolley. Application-driven design of soft, 3-D printed, pneumatic actuators with bellows. IEEE/ASME Transactions on Mechatronics, 2019, 24(1): 78–87
https://doi.org/10.1109/TMECH.2018.2879299
|
| 22 |
X D Zheng, T W Yang, X J Zhu, Z Chen, X Q Wang, B Liang. Dynamic modeling and experimental verification of a cable-driven continuum manipulator with cable-constrained synchronous rotating mechanisms. Nonlinear Dynamics, 2022, 107(1): 153–172
https://doi.org/10.1007/s11071-021-06989-w
|
| 23 |
L Tang, L M Zhu, X Y Zhu, G Y Gu. Confined spaces path following for cable-driven snake robots with prediction lookup and interpolation algorithms. Science China Technological Sciences, 2020, 63(2): 255–264
https://doi.org/10.1007/s11431-019-1440-2
|
| 24 |
F Renda, M Giorelli, M Calisti, M Cianchetti, C Laschi. Dynamic model of a multibending soft robot arm driven by cables. IEEE Transactions on Robotics, 2014, 30(5): 1109–1122
https://doi.org/10.1109/TRO.2014.2325992
|
| 25 |
B Fang, F C Sun, L Y Wu, F K Liu, X X Wang, H M Huang, W B Huang, H P Liu, L Wen. Multimode grasping soft gripper achieved by layer jamming structure and tendon-driven mechanism. Soft Robotics, 2022, 9(2): 233–249
https://doi.org/10.1089/soro.2020.0065
|
| 26 |
A B Clark, V Mathivannan, N Rojas. A continuum manipulator for open-source surgical robotics research and shared development. IEEE Transactions on Medical Robotics and Bionics, 2021, 3(1): 277–280
https://doi.org/10.1109/TMRB.2020.3041391
|
| 27 |
K Xu, P J Zi, X L Ding. Learning from biological attachment devices: applications of bioinspired reversible adhesive methods in robotics. Frontiers of Mechanical Engineering, 2022, 17(3): 43
https://doi.org/10.1007/s11465-022-0699-x
|
| 28 |
L Li, S Q Wang, Y Y Zhang, S Y Song, C Q Wang, S C Tan, W Zhao, G Wang, W G Sun, F Q Yang, J Q Liu, B H Chen, H Y Xu, P Nguyen, M Kovac, L Wen. Aerial-aquatic robots capable of crossing the air‒water boundary and hitchhiking on surfaces. Science Robotics, 2022, 7(66): eabm6695
https://doi.org/10.1126/scirobotics.abm6695
|
| 29 |
O A Araromi, I Gavrilovich, J Shintake, S Rosset, M Richard, V Gass, H R Shea. Rollable multisegment dielectric elastomer minimum energy structures for a deployable microsatellite gripper. IEEE/ASME Transactions on Mechatronics, 2015, 20(1): 438–446
https://doi.org/10.1109/TMECH.2014.2329367
|
| 30 |
N F Wang, B C Chen, X D Ge, X M Zhang, W B Wang. Modular crawling robots using soft pneumatic actuators. Frontiers of Mechanical Engineering, 2021, 16(1): 163–175
https://doi.org/10.1007/s11465-020-0605-3
|
| 31 |
Y C Zhang, P C Li, J L Quan, L Q Li, G Y Zhang, D K Zhou. Progress, challenges, and prospects of soft robotics for space applications. Advanced Intelligent Systems, 2023, 5(3): 2200071
https://doi.org/10.1002/aisy.202200071
|
| 32 |
Z K Zhang, Z F Shao, Z You, X Q Tang, B Zi, G L Yang, C Gosselin, S Caro. State-of-the-art on theories and applications of cable-driven parallel robots. Frontiers of Mechanical Engineering, 2022, 17(3): 37
https://doi.org/10.1007/s11465-022-0693-3
|
| 33 |
X Q Chen, X Zhang, Y Y Huang, L Cao, J G Liu. A review of soft manipulator research, applications, and opportunities. Journal of Field Robotics, 2022, 39(3): 281–311
https://doi.org/10.1002/rob.22051
|
| 34 |
Y H Liu, K Luo, S Wang, X D Song, Z J Zhang, Q Tian, H Y Hu. A soft and bistable gripper with adjustable energy barrier for fast capture in space. Soft Robotics, 2023, 10(1): 77–87
https://doi.org/10.1089/soro.2021.0147
|
| 35 |
C H Liu, F M Chung, Y Chen, C H Chiu, T L Chen. Optimal design of a motor-driven three-finger soft robotic gripper. IEEE/ASME Transactions on Mechatronics, 2020, 25(4): 1830–1840
https://doi.org/10.1109/TMECH.2020.2997743
|
| 36 |
T K WuZ Y LiuB Y WangZ Q MaD L Ma X W Deng. A versatile topology-optimized compliant actuator for soft robotic gripper and walking robot. Soft Robotics, 2024, 11(1): 157–170.
|
| 37 |
J Shintake, V Cacucciolo, D Floreano, H Shea. Soft robotic grippers. Advanced Materials, 2018, 30(29): 1707035
https://doi.org/10.1002/adma.201707035
|
| 38 |
D Rus, M T Tolley. Design, fabrication and control of soft robots. Nature, 2015, 521(7553): 467–475
https://doi.org/10.1038/nature14543
|
| 39 |
P Rothemund, Y Kim, R H Heisser, X H Zhao, R F Shepherd, C Keplinger. Shaping the future of robotics through materials innovation. Nature Materials, 2021, 20(12): 1582–1587
https://doi.org/10.1038/s41563-021-01158-1
|
| 40 |
S I Rich, R J Wood, C Majidi. Untethered soft robotics. Nature Electronics, 2018, 1(2): 102–112
https://doi.org/10.1038/s41928-018-0024-1
|
| 41 |
N B Zhang, L S Ge, H P Xu, X Y Zhu, G Y Gu. 3D printed, modularized rigid-flexible integrated soft finger actuators for anthropomorphic hands. Sensors and Actuators A: Physical, 2020, 312: 112090
https://doi.org/10.1016/j.sna.2020.112090
|
| 42 |
N Wettels, A R Parnandi, J H Moon, G E Loeb, G S Sukhatme. Grip control using biomimetic tactile sensing systems. IEEE/ASME Transactions on Mechatronics, 2009, 14(6): 718–723
https://doi.org/10.1109/TMECH.2009.2032686
|
| 43 |
C Tawk, H Zhou, E Sariyildiz, M in het Panhuis, G M Spinks, G Alici. Design, modeling, and control of a 3D printed monolithic soft robotic finger with embedded pneumatic sensing chambers. IEEE/ASME Transactions on Mechatronics, 2021, 26(2): 876–887
https://doi.org/10.1109/TMECH.2020.3009365
|
| 44 |
D O Smith, C Oura, C Kimura, K Toshimori. The distal venous anatomy of the finger. The Journal of Hand Surgery, 1991, 16(2): 303–307
https://doi.org/10.1016/S0363-5023(10)80115-7
|
| 45 |
M Controzzi, M D’Alonzo, C Peccia, C M Oddo, M C Carrozza, C Cipriani. Bioinspired fingertip for anthropomorphic robotic hands. Applied Bionics and Biomechanics, 2014, 11(1–2): 864573
https://doi.org/10.1155/2014/864573
|
| 46 |
M C Hume, H Gellman, H McKellop, R H Brumfield. Functional range of motion of the joints of the hand. The Journal of Hand Surgery, 1990, 15(2): 240–243
https://doi.org/10.1016/0363-5023(90)90102-W
|
| 47 |
D Y LiangW Z ZhangZ G SunQ Chen. PASA finger: a novel parallel and self-adaptive underactuated finger with pinching and enveloping grasp. In: Proceedings of 2015 IEEE International Conference on Robotics and Biomimetics. Zhuhai: IEEE, 2015, 1323–1328
|
| 48 |
B Fang, F C Sun, L Y Wu, F K Liu, X X Wang, H M Huang, W B Huang, H P Liu, L Wen. Multimode grasping soft gripper achieved by layer jamming structure and tendon-driven mechanism. Soft Robotics, 2022, 9(2): 233–249
https://doi.org/10.1089/soro.2020.0065
|
| 49 |
T N Le, J M Battini, M Hjiaj. Efficient formulation for dynamics of corotational 2D beams. Computational Mechanics, 2011, 48(2): 153–161
https://doi.org/10.1007/s00466-011-0585-6
|
| 50 |
A SapietováL GajdošV DekýšM Sapieta. Analysis of the influence of input function contact parameters of the impact force process in the MSC. ADAMS. In: Jabłoński R, Brezina T, eds. Advanced Mechatronics Solutions. Cham: Springer, 2016, 243–253
|
| 51 |
M Arnold, O Brüls. Convergence of the generalized-α scheme for constrained mechanical systems. Multibody System Dynamics, 2007, 18(2): 185–202
https://doi.org/10.1007/s11044-007-9084-0
|
| 52 |
C J Yang, W H Zhang, G X Ren, X Y Liu. Modeling and dynamics analysis of helical spring under compression using a curved beam element with consideration on contact between its coils. Meccanica, 2014, 49(4): 907–917
https://doi.org/10.1007/s11012-013-9837-1
|
| 53 |
Alifdhyatra A F, Sunarya B A Y, Hidayat E M I, Anshori I, Hadi Y W. Development of pneumatic networks soft robot with anti-windup PID control. In: Proceedings of the 13th IEEE Control and System Graduate Research Colloquium. Shah Alam: IEEE, 2022, 25–30
|
| 54 |
D Wang, L Li, B Zhang, Y F Zhang, M S Wu, G Y Gu, Q Ge. Effect of temperature on the programmable helical deformation of a reconfigurable anisotropic soft actuator. International Journal of Solids and Structures, 2020, 199: 169–180
https://doi.org/10.1016/j.ijsolstr.2020.04.028
|
| 55 |
B Mosadegh, P Polygerinos, C Keplinger, S Wennstedt, R F Shepherd, U Gupta, J Shim, K Bertoldi, C J Walsh, G M Whitesides. Pneumatic networks for soft robotics that actuate rapidly. Advanced Functional Materials, 2014, 24(15): 2163–2170
https://doi.org/10.1002/adfm.201303288
|
| 56 |
S Abondance, C B Teeple, R J Wood. A dexterous soft robotic hand for delicate in-hand manipulation. IEEE Robotics and Automation Letters, 2020, 5(4): 5502–5509
https://doi.org/10.1109/LRA.2020.3007411
|
| 57 |
S H Scott. Optimal feedback control and the neural basis of volitional motor control. Nature Reviews Neuroscience, 2004, 5(7): 532–545
https://doi.org/10.1038/nrn1427
|
| 58 |
C Bozzacchi, R Volcic, F Domini. Effect of visual and haptic feedback on grasping movements. Journal of Neurophysiology, 2014, 112(12): 3189–3196
https://doi.org/10.1152/jn.00439.2014
|
| 59 |
G G Du, K Wang, S G Lian, K Y Zhao. Vision-based robotic grasping from object localization, object pose estimation to grasp estimation for parallel grippers: a review. Artificial Intelligence Review, 2021, 54(3): 1677–1734
https://doi.org/10.1007/s10462-020-09888-5
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|