|
|
|
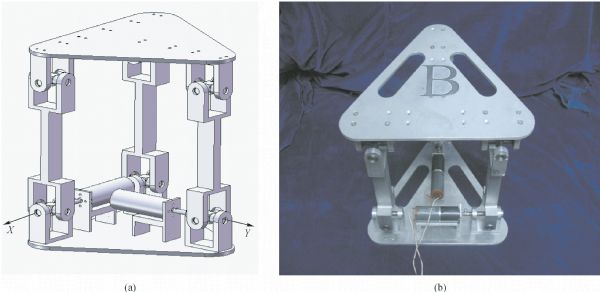
A rolling 6U parallel mechanism |
Zhihuai MIAO, Yanan YAO( ) ) |
| School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing 100044, China |
|
|
|
|
|
|
Corresponding Author(s):
YAO Yanan,Email:yayao@bjtu.edu.cn
|
|
Issue Date: 05 March 2011
|
|
| 1 |
Stewart D. A platform with six degrees of freedom. In: Proceedings of Institution of Mechanical Engineers , 1965, 180(15): 371–386
doi: 10.1243/PIME_PROC_1965_180_029_02
|
| 2 |
Clavel R. DELTA, a fast robot with parallel geometry. Proceedings of the 18th International Symposium on Industrial Robots, Lausanne, Switzerland , 1988, 91–100
|
| 3 |
Hirose S, Homma K, Matsuzawa S, Hayakawa S. Parallel link walking vehicle and its basic experiments. The 6th Symposium on Intelligent Mobile Robots. Japan , 1992, 7–8
|
| 4 |
Dunlop G R. Foot design for a large walking Delta robot. The 8th International Symposium on Experimental Robotics , 2002, 602– 611
|
| 5 |
Sugahara Y, Carbone G, Hashimoto K, Ceccarelli M, Lim H O, Takanishi A. Experimental stiffness measurement of WL-16RII biped walking vehicle during walking operation. Journal of Robotics and Mechatronics , 2007, 19(3): 272–280
|
| 6 |
Rhodri H A, Julian F V. Rolling in nature and robotics: A review. Journal of Bionic Engineering , 2006, 3(4): 195–208
doi: 10.1016/S1672-6529(07)60003-1
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|