|
|
|
Design and simulation of a cable-pulley-based transmission for artificial ankle joints |
Huaxin LIU1,Marco CECCARELLI2,*( ),Qiang HUANG3 ),Qiang HUANG3 |
1. Intelligent Robotics Institute, School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 100081, China; Key Laboratory of Biomimetic Robots and Systems (Beijing Institute of Technology), Ministry of Education, Beijing 100081, China
2. Laboratory of Robotics and Mechatronics (LARM), DICeM, University of Cassino and South Latium, Cassino 03043, Italy
3. Intelligent Robotics Institute, School of Mechatronical Engineering, Beijing Institute of Technology, Beijing 100081, China; Key Laboratory of Biomimetic Robots and Systems (Beijing Institute of Technology), Ministry of Education, Beijing 100081, China; Beijing Innovation Center for Intelligent Robots and Systems, Beijing 100081, China; State Key Laboratory of Intelligent Control and Decision of Complex Systems, Beijing 100081, China |
|
|
|
|
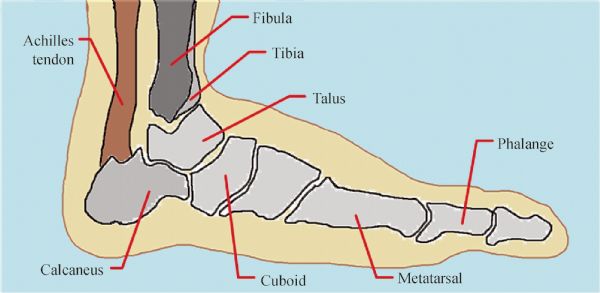
Abstract In this paper, a mechanical transmission based on cable pulley is proposed for human-like actuation in the artificial ankle joints of human-scale. The anatomy articular characteristics of the human ankle is discussed for proper biomimetic inspiration in designing an accurate, efficient, and robust motion control of artificial ankle joint devices. The design procedure is presented through the inclusion of conceptual considerations and design details for an interactive solution of the transmission system. A mechanical design is elaborated for the ankle joint angular with pitch motion. A multi-body dynamic simulation model is elaborated accordingly and evaluated numerically in the ADAMS environment. Results of the numerical simulations are discussed to evaluate the dynamic performance of the proposed design solution and to investigate the feasibility of the proposed design in future applications for humanoid robots.
|
| Keywords
biomimetic designs
ankle joints
cable-pulley transmissions
multi-body dynamic simulation
numerical characterization
|
|
Corresponding Author(s):
Marco CECCARELLI
|
|
Online First Date: 23 May 2016
Issue Date: 29 June 2016
|
|
| 1 |
Hirai K, Hirose M, Haikawa Y, . The development of Honda humanoid robot. In: Proceedings of 1998 IEEE International Conference on Robotics and Automation. Leuven: IEEE, 1998, 2: 1321–1326
|
| 2 |
Kaneko K, Kanehiro F, Kajita S, . Humanoid robot HRP-2. In: Proceedings of 2004 IEEE International Conference on Robotics and Automation. IEEE, 2004, 1083–1090
|
| 3 |
Park W, Kim J Y, Park S W. Development of humanoid robot platform KHR-2 (KAISThumanoidrobot-2). In: Proceedings of 2004 4th IEEE/RAS International Conference on Humanoid Robots. IEEE, 2004, 1: 292–310
|
| 4 |
Hirukawa H, Kanehiro F, Kaneko K, . Humanoid robotic platforms developed in HRP. Robotics and Autonomous Systems, 2004, 48(4): 165–175
https://doi.org/10.1016/j.robot.2004.07.007
|
| 5 |
Omer A M M, Ghorbani R, Lim H O, . Semi-passive dynamic walking for biped walking robot using controllable joint stiffness based on dynamic simulation. In: Proceedings of 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Singapore: IEEE, 2009, 1600–1605
|
| 6 |
Urata J, Nakanishi Y, Okada K, . Design of high torque and high speed leg module for high power humanoid. In: Proceedings of 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. Taipei: IEEE, 2010, 4497–4502
|
| 7 |
Ito Y, Nakaoka T, Urata J, . Design and development of a tendon-driven and axial-driven hybrid humanoid leg with high-power motor driving system. In: Proceedings of 2012 12th IEEE-RAS International Conference on Humanoid Robots. Osaka: IEEE, 2012, 475–480
|
| 8 |
Lohmeier S, Buschmann T, Ulbrich H, . Modular joint design for performance enhanced humanoid robot LOLA. In: Proceedings of IEEE International Conference on Robotics and Automation. Orlando: IEEE, 2006, 88–93
|
| 9 |
Lohmeier S, Buschmann T, Schwienbacher M, . Leg design for a humanoid walking robot. In: Proceedings of 2006 6th IEEE-RAS International Conference on Humanoid Robots. Genova: IEEE, 2006, 536–541
|
| 10 |
Cheng G, Hyon S H, Morimoto J, . CB: A humanoid research platform for exploring neuroscience. Advanced Robotics, 2007, 21(10): 1097–1114
https://doi.org/10.1163/156855307781389356
|
| 11 |
Alfayad S, Ouezdou F B, Namoun F, . Lightweight high performance integrated actuator for humanoid robotic applications: Modeling, design & realization. In: Proceedings of IEEE International Conference on Robotics and Automation. Kobe: IEEE, 2009, 562–567
|
| 12 |
Alfayad S, Ouezdou F B, Namoun F. New three DOF ankle mechanism for humanoid robotic application: Modeling, design and realization. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. St. Louis: IEEE, 2009, 4969–4976
|
| 13 |
Winter D A. The Biomechanics and Motor Control of Human Gait: Normal, Elderly and Pathological. 2nd ed. Waterloo: University of Waterloo Press, 1991
|
| 14 |
Zeng F, Zhu G, Tsoi Y H, . A computational biomechanical model of the human ankle for development of an ankle rehabilitation robot. In: Proceedings of 2014 IEEE/ASME 10th International Conference on Mechatronic and Embedded Systems and Applications (MESA). Senigallia: IEEE, 2014, 1–6
|
| 15 |
Iyer R, Ballard D. Humanoid muscle movement representation. In: Proceedings of 2011 11th IEEE-RAS International Conference on Humanoid Robots (Humanoids). Bled: IEEE, 2011, 409–415
|
| 16 |
Shahrokhshahi A, Khalili M, Yousefi-Koma A, . System identification of a humanoid robot power transmission system. In: Proceedings of 2014 Second RSI/ISM International Conference on Robotics and Mechatronics. Tehran: IEEE, 2014, 328–332
|
| 17 |
Knabe C S, Orekhov V, Hopkins M A, . Two configurations of series elastic actuators for linearly actuated humanoid robots with large range of motion. In: Proceedings of 2014 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids). Madrid: IEEE, 2014, 1096–1096
|
| 18 |
Tsagarakis N G, Li Z, Saglia J, . The design of the lower body of the compliant humanoid robot “cCub”. In: Proceedings of 2011 IEEE International Conference on Robotics and Automation (ICRA). Shanghai: IEEE, 2011, 2035–2040
|
| 19 |
Lens T, Kirchhoff J, von Stryk O. Dynamic modeling of elastic tendon actuators with tendon slackening. In: Proceedings of 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids). Osaka: IEEE, 2012, 779–784
|
| 20 |
Olaru I M C, Krut S, Pierrot F. Novel mechanical design of biped robot SHERPA using 2 DOF cable differential modular joints. In: Proceedings of 2009 IEEE/RSJ International Conference on Intelligent Robotsand Systems. St. Louis: IEEE, 2009, 4463–4468
|
| 21 |
Liu H, Ceccarelli M, Huang Q, . A cable-pulley transmission for ankle joint actuation in artificial leg. In: Proceedings of the 3rd IEEE/IFToMM International Conference on Reconfigurable Mechanisms and Robots (ReMAR 2015). Beijing: Springer, 2015
|
| 22 |
Woo H, Song S K, Jeon D, . Design of a compact hydraulic actuation mechanism for active ankle-foot prostheses. In: Proceedings of 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Besacon: IEEE, 2014, 275–278
|
| 23 |
Fu A, Fu C, Wang K, . The key parameter selection in design of an active electrical transfemoral prosthesis. In: Proceedings of 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO). Shenzhen: IEEE,2013, 1716–1721
|
| 24 |
Pillai M V, Kazerooni H, Hurwich A. Design of a semi-active knee-ankle prosthesis. In: Proceedings of 2011 IEEE International Conference on Robotics and Automation (ICRA). Shanghai: IEEE, 2011, 5293–5300
|
| 25 |
Sup F, Varol H A, Mitchell J, . Design and control of an active electrical knee and ankle prosthesis. In: Proceedings of 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Scottsdale: IEEE, 2008, 523–528
|
| 26 |
Ayusawa K, Venture G, Nakamura Y. Identification of the inertial parameters of a humanoid robot using unactuated dynamics of the base link. In: Proceedings of 2008 8th IEEE-RAS International Conference on Humanoid Robots. Daejeon: IEEE, 2008, 1–7
|
| 27 |
Mechanical Dynamics Inc. ADAMS, Documentation and Help, User CD-ROM, 2005
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|