|
|
|
A new efficient optimal path planner for mobile robot based on Invasive Weed Optimization algorithm |
Prases K. MOHANTY( ),Dayal R. PARHI ),Dayal R. PARHI |
| Robotics Laboratory, National Institute of Technology, Rourkela, 769008, India |
|
|
|
|
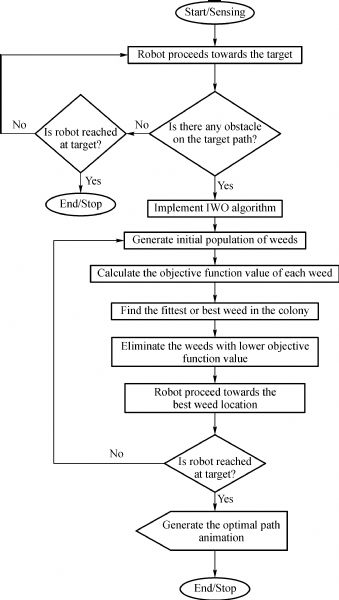
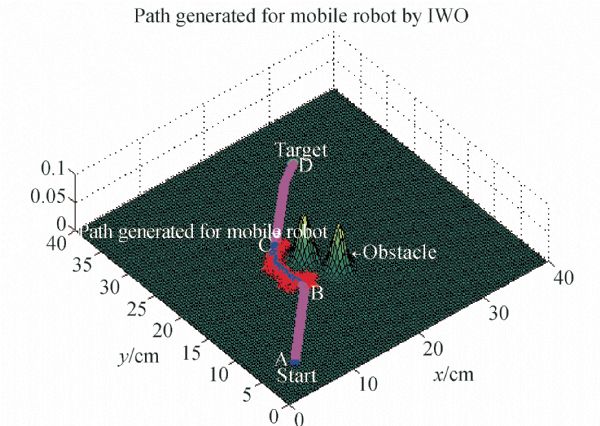
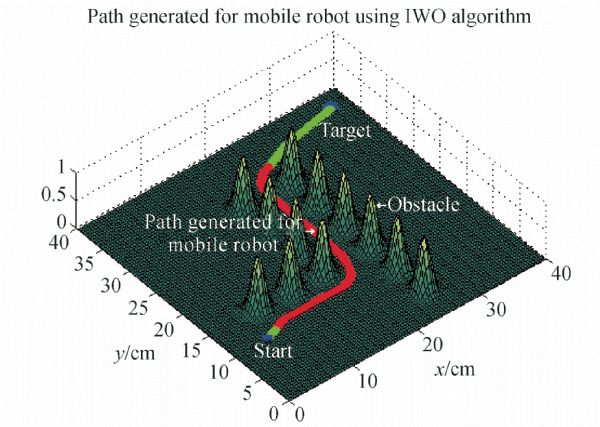
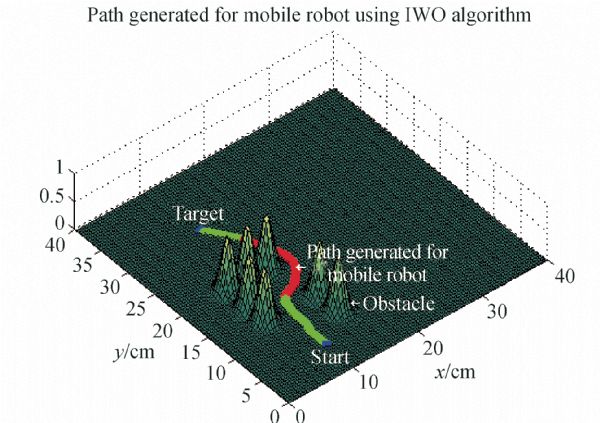
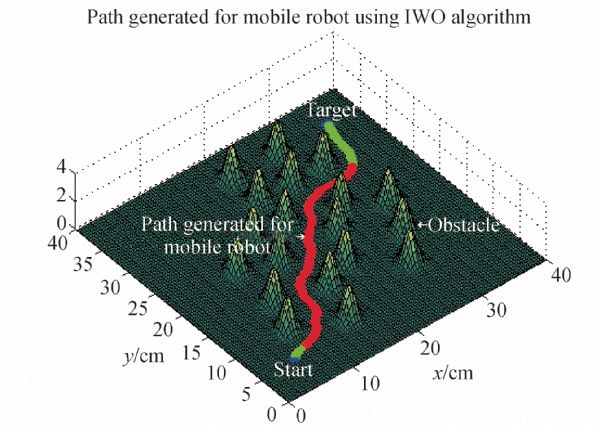
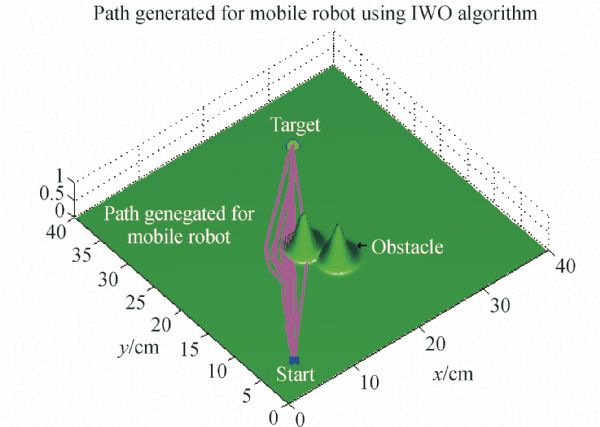
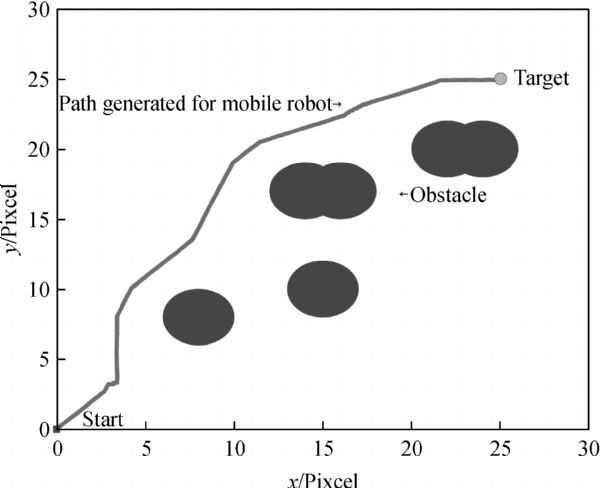
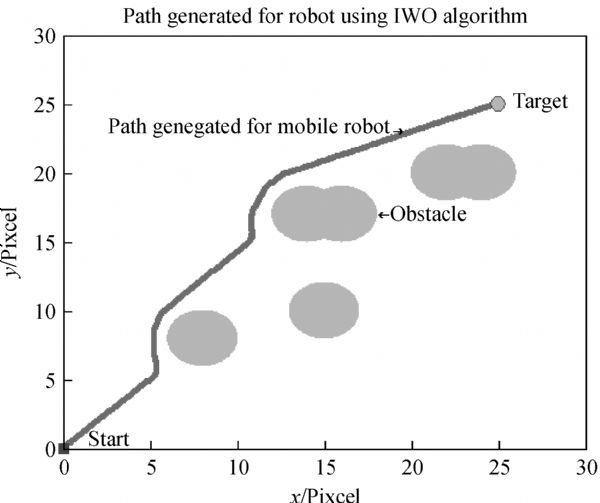
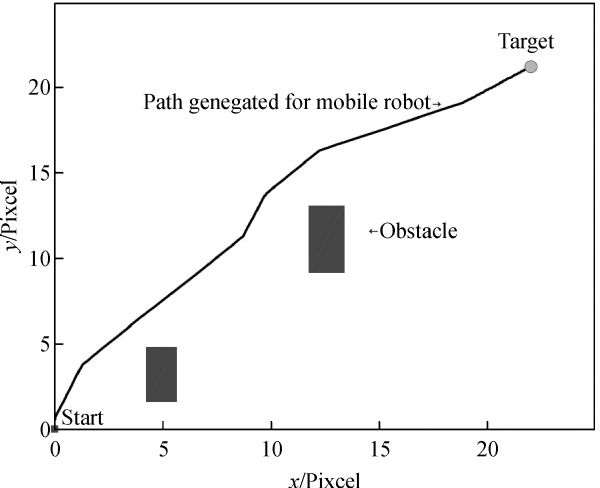
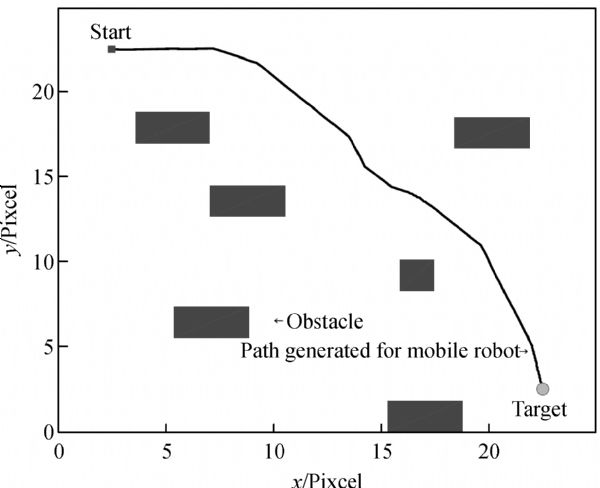
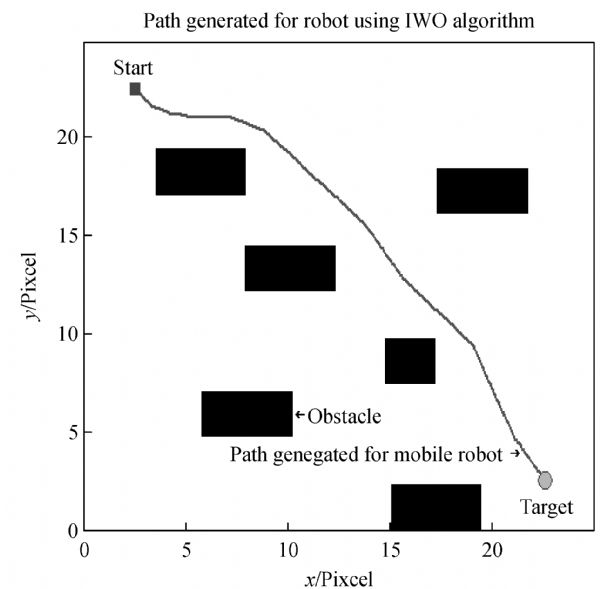
Abstract Planning of the shortest/optimal route is essential for efficient operation of autonomous mobile robot or vehicle. In this paper Invasive Weed Optimization (IWO), a new meta-heuristic algorithm, has been implemented for solving the path planning problem of mobile robot in partially or totally unknown environments. This meta-heuristic optimization is based on the colonizing property of weeds. First we have framed an objective function that satisfied the conditions of obstacle avoidance and target seeking behavior of robot in partially or completely unknown environments. Depending upon the value of objective function of each weed in colony, the robot avoids obstacles and proceeds towards destination. The optimal trajectory is generated with this navigational algorithm when robot reaches its destination. The effectiveness, feasibility, and robustness of the proposed algorithm has been demonstrated through series of simulation and experimental results. Finally, it has been found that the developed path planning algorithm can be effectively applied to any kinds of complex situation.
|
| Keywords
mobile robot
obstacle avoidance
Invasive Weed Optimization
navigation
|
|
Corresponding Author(s):
Prases K. MOHANTY
|
|
Online First Date: 14 August 2014
Issue Date: 19 December 2014
|
|
| 1 |
Latombe J C. Robot Motion Planning. Boston: Kluwer Academic Publisher, 1991
|
| 2 |
Mitchell J S B. An algorithm approach to some problems in terrain navigation. Artificial Intelligence, 1988, 37(1–3): 171–201
https://doi.org/10.1016/0004-3702(88)90054-9
|
| 3 |
Takahashi O, Schilling R J. Motion planning in a plane using generalized Voronoi diagrams. IEEE Transactions on Robotics and Automation, 1989, 5(2): 143–150
https://doi.org/10.1109/70.88035
|
| 4 |
Weigl M, Siemiaatkowska B, Sikorski K A, Borkowski A. Grid-based mapping for autonomous mobile robot. Robotics and Autonomous Systems, 1993, 11(1): 13–21
https://doi.org/10.1016/0921-8890(93)90004-V
|
| 5 |
Lingelbach F. Path planning using probabilistic cell decomposition, In: Proceedings of the IEEE International Conference on Robotics and Automation. New Orleans, 2004, 467–472
|
| 6 |
Khatib O. Real time obstacle avoidance for manipulators and mobile robots. In: Proceedings IEEE International Conference on Robotics and Automation. Missouri, 1985, 500–505
|
| 7 |
Andrews J R, Hogan N. Impedance control as a framework for implementing obstacle avoidance in a manipulator. In: Hardt D E, Book W, eds. Control of Manufacturing Processes and Robotic Systems. Boston, 1983, 243–251
|
| 8 |
Huang H M. An architecture and a methodology for intelligent control. IEEE Expert: Intelligent System Application, 1996, 11(2): 46–55
|
| 9 |
Brooks R. A robust layered control system for mobile robot. IEEE Journal on Robotics and Automation, 1986, 2(1): 14–23
https://doi.org/10.1109/JRA.1986.1087032
|
| 10 |
Selekwa M F, Dunlap D D, Shi D Q, Collins E G Jr. Robot navigation in very cluttered environment by preference based fuzzy behaviors. Robotics and Autonomous Systems, 2008, 56(3): 231–246
https://doi.org/10.1016/j.robot.2007.07.006
|
| 11 |
Abdessemed F, Benmahammed K, Monacelli E. A fuzzy-based reactive controller for a non-holonomic mobile robot. Robotics and Autonomous Systems, 2004, 47(1): 31–46
https://doi.org/10.1016/j.robot.2004.02.006
|
| 12 |
Lei B, Li W F. A fuzzy behaviours fusion algorithm for mobile robot real-time path planning in unknown environment. In: Proceedings of the IEEE International Conference on Integration Technology (ICIT ’07). 2007, 173–178
|
| 13 |
Samsudin K, Ahmad F A, Mashohor S. A highly interpretable fuzzy rule base using ordinal structure for obstacle avoidance of mobile robot. Applied Soft Computing, 2011, 11(2): 1631–1637
https://doi.org/10.1016/j.asoc.2010.05.002
|
| 14 |
Velagic J, Osmic N, Lacevic B. Neural network controller for mobile robot motion control. International Journal of Intelligent Systems and Technologies, 2008, 3(3): 127–132
|
| 15 |
Singh M K, Parhi D R. Intelligent Neuro-Controller for Navigation of Mobile Robot. In: Proceedings of the International Conference on Advances in Computing, Communication and Control. Mumbai, 2009, 123–128
|
| 16 |
Castro V, Neira J P, Rueda C L, Villamizar J C, Angel L. Autonomous navigation strategies for mobile robots using a Probabilistic Neural Network (PNN). In: 33rd Annual Conference of the IEEE Industrial Electronics Society (IECON). Taipei, 2007, 2795–2800
|
| 17 |
Choi J M, Lee S J, Won M. Self-learning navigation algorithm for vision-based mobile robots using machine learning algorithms. Journal of Mechanical Science and Technology, 2011, 25(1): 247–254
https://doi.org/10.1007/s12206-010-1023-y
|
| 18 |
Ram A, Arkin R C, Boone G N, Pearce M. Using genetic algorithms to learn reactive control parameters for autonomous robotic navigation. Adaptive Behavior, 1994, 2(3): 277–305
|
| 19 |
Nagib G, Gharieb W. 2004, Path planning for a mobile robot using genetic algorithms. In: International Conference on Electrical, Electronic and Computer Engineering, ICEEC ’04. 2004, 185–189
|
| 20 |
Liu C L, Liu H W, Yang J Y. A path planning method based on adaptive genetic algorithm for mobile robot. Journal of Information & Computational Science, 2011, 8(5): 808–814
|
| 21 |
Parhi D R K, Pothal J. Intelligent navigation of multiple mobile robots using an ant colony optimization technique in a highly cluttered environment. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2010, 225: 225–232
|
| 22 |
Cen Y, Song C, Xie N, Wang L. Path planning method for mobile robot based on ant colony optimization algorithm. In: 3rd IEEE Conference on Industrial Electronics and Applications (ICIEA). Singapore, 2008, 289–301
|
| 23 |
Gopalakrishnan K, Ramakrishnan S, Dagli C. Optimal path planning of mobile robot with multiple target using ant colony optimization. Intelligent Engineering Systems through Artificial Neural Networks, 2006, 16: 1–6
|
| 24 |
Montiel-Ross O, Sepulveda R, Castillo O, Melin P. Ant colony test center for planning autonomous mobile robot navigation. Computer Applications in Engineering Education, 2013, 21(2): 214–229
https://doi.org/10.1002/cae.20463
|
| 25 |
Deepak B B V L, Parhi D R K. Intelligent adaptive immune-based motion planner of a mobile robot in cluttered environment. Intelligent Service Robotics, 2013, 6(3): 155–162
https://doi.org/10.1007/s11370-013-0131-9
|
| 26 |
Luh G C, Liu W W. An immunological approach to mobile robot reactive navigation. Applied Soft Computing, 2008, 8(1): 30–45
https://doi.org/10.1016/j.asoc.2006.10.009
|
| 27 |
Yuan M, Wang S, Wu C, Chen N. A novel immune network strategy for robot path planning in complicated environments. Journal of Intelligent & Robotic Systems, 2010, 60(1): 111–131
https://doi.org/10.1007/s10846-010-9408-9
|
| 28 |
Liang X D, Li L Y, Wu J G, Chen H N. Mobile robot path planning based on adaptive bacterial foraging algorithm. Journal of Central South University, 2013, 20(12): 3391–3400
https://doi.org/10.1007/s11771-013-1864-5
|
| 29 |
Mohanty P K, Parhi D R K. Cuckoo search algorithm for the mobile robot navigation. Lecture Notes in Computer Science (LNCS), 2013, 8297: 527–536
|
| 30 |
Zhang Y, Gong D W, Zhang J H. Robot path planning in uncertain environment using multi-objective particle swarm optimization. Neurocomputing, 2013, 103: 172–185
https://doi.org/10.1016/j.neucom.2012.09.019
|
| 31 |
Juang C F, Chang Y C. Evolutionary-group-based particle-swarm-optimized fuzzy controller with application to mobile-robot navigation in unknown environments. IEEE Transactions on Fuzzy Systems, 2011, 19(2): 379–392
https://doi.org/10.1109/TFUZZ.2011.2104364
|
| 32 |
Lu L, Gong D. Robot path planning in unknown environments using particle swarm optimization. In: Fourth International Conference on Natural Computation (ICNC). Jinan, 2008, 422–426
|
| 33 |
Mehrabian A R, Lucas C. A novel numerical optimization algorithm inspired from weed colonization. Ecological Informatics, 2006, 1(4): 355–366
https://doi.org/10.1016/j.ecoinf.2006.07.003
|
| 34 |
Kundu D, Suresh K, Ghosh S, Das S, Panigrahi B K, Das S. Multi-objective optimization with artificial weed colonies. Information Sciences, 2011, 181(12): 2441–2454
https://doi.org/10.1016/j.ins.2010.09.026
|
| 35 |
Basak A, Maity D, Das S. A differential invasive weed optimization algorithm for improved global numerical optimization. Applied Mathematics and Computation, 2013, 219(12): 6645–6668
https://doi.org/10.1016/j.amc.2012.12.057
|
| 36 |
Nikoofard A H, Hajimirsadeghi H, Rahimi-Kian A, Lucas C. Multi-objective invasive weed optimization: Application to analysis of Pareto improvement models in electricity markets. Applied Soft Computing, 2012, 12(1): 100–112
https://doi.org/10.1016/j.asoc.2011.09.005
|
| 37 |
Mallahzadeh A R, Oraizi H, Davoodi-Rad Z. Application of the invasive weed optimization technique for antenna configurations. Progress in Electromagnetics Research, 2008, 79: 137–150
https://doi.org/10.2528/PIER07092503
|
| 38 |
Ramezani Ghalenoei M, Hajimirsadeghi H, Lucas C. Discrete invasive weed optimization algorithm: Application to cooperative multiple task assignment of UAVs. In: Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference. Shanghai, 2009, 16–18
|
| 39 |
Karimkashi S, Kishk A A. Invasive weed optimization and its features in electromagnetics. IEEE Transactions on Antennas and Propagation, 2010, 58(4): 1269–1278
https://doi.org/10.1109/TAP.2010.2041163
|
| 40 |
Rad H S, Lucas C. A recommender system based on invasive weed optimization algorithm. In: IEEE Congress on Evolutionary Computation. 2007, 4297–4304
|
| 41 |
Jayabarathi T, Yazdani A, Ramesh V, Raghunathan T. Combined heat and power economic dispatch problem using the invasive weed optimization algorithm. Frontiers in Energy, 2014, 8(1): 25–30
https://doi.org/10.1007/s11708-013-0276-4
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|