|
|
|
Evaluation of the power consumption of a high-speed parallel robot |
Gang HAN1, Fugui XIE1,2( ), Xin-Jun LIU1,2() ), Xin-Jun LIU1,2() |
1. The State Key Laboratory of Tribology & Institute of Manufacturing Engineering, Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China
2. Beijing Key Laboratory of Precision/Ultra-precision Manufacturing Equipments and Control, Tsinghua University, Beijing 100084, China |
|
|
|
|
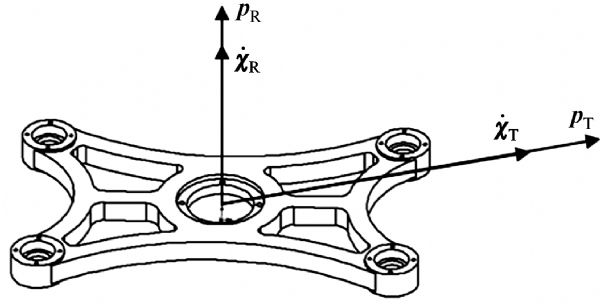
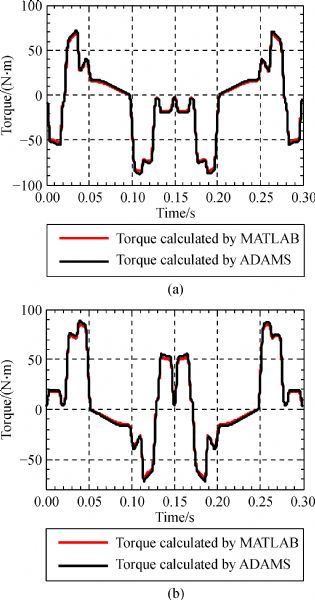
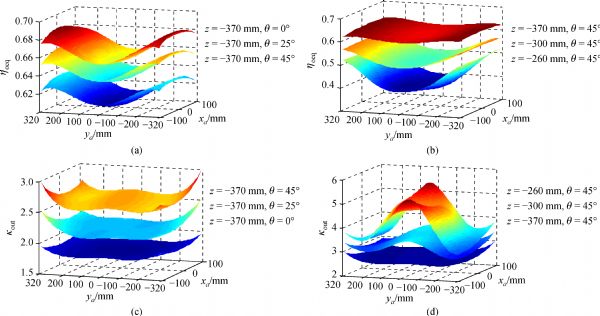
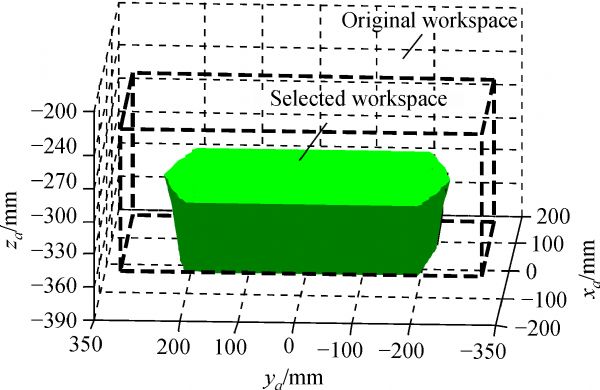
Abstract An inverse dynamic model of a high-speed parallel robot is established based on the virtual work principle. With this dynamic model, a new evaluation method is proposed to measure the power consumption of the robot during pick-and-place tasks. The power vector is extended in this method and used to represent the collinear velocity and acceleration of the moving platform. Afterward, several dynamic performance indices, which are homogenous and possess obvious physical meanings, are proposed. These indices can evaluate the power input and output transmissibility of the robot in a workspace. The distributions of the power input and output transmissibility of the high-speed parallel robot are derived with these indices and clearly illustrated in atlases. Furtherly, a low-power-consumption workspace is selected for the robot.
|
| Keywords
high-speed parallel robot
dynamic model
power consumption
evaluation method
power vector
|
|
Corresponding Author(s):
Fugui XIE,Xin-Jun LIU
|
|
Just Accepted Date: 07 June 2017
Online First Date: 20 July 2017
Issue Date: 16 March 2018
|
|
| 1 |
Xie F, Liu X, Zhou Y. A parallel robot with SCARA motions and its kinematic issues. In: Proceedings of the 3rd IFToMM International Symposium on Robotics and Mechatronics. Singapore: Research Publishing, 2013, 53–62
|
| 2 |
Patel S, Sobh T. Manipulator performance measures—A comprehensive literature survey. Journal of Intelligent & Robotic Systems, 2015, 77(3): 547–570
https://doi.org/10.1007/s10846-014-0024-y
|
| 3 |
Mansouri I, Ouali M. A new homogeneous manipulability measure of robot manipulators, based on power concept. Mechatronics, 2009, 19(6): 927–944
https://doi.org/10.1016/j.mechatronics.2009.06.008
|
| 4 |
Asada H. A geometrical representation of manipulator dynamics and its application to arm design. Journal of Dynamic Systems, Measurement, and Control, 1983, 105(3): 131–135
https://doi.org/10.1115/1.3140644
|
| 5 |
Asada H. Dynamic analysis and design of robot manipulators using inertia ellipsoids. In: Proceedings of the IEEE International Conference on Robotics and Automation. Atlanta: IEEE, 1984, 94–102
https://doi.org/10.1109/ROBOT.1984.1087211
|
| 6 |
Yoshikawa T. Dynamic manipulability of robot manipulators. In: Proceedings of IEEE International Conference on Robotics and Automation. IEEE, 1985, 1033–1038
https://doi.org/10.1109/ROBOT.1985.1087277
|
| 7 |
Yoshikawa T. Translational and rotational manipulability of robotic manipulators. In: Proceedings of International Conference on Industrial Electronics, Control and Instrumentation. Kobe: IEEE, 1991, 1170–1175
|
| 8 |
Ma O, Angeles J. The concept of dynamics isotropy and its applications to inverse kinematics and trajectory planning. In: Proceedings of the IEEE International Conference on Robotics and Automation. Cincinnati: IEEE, 1990, 481–486
https://doi.org/10.1109/ROBOT.1990.126024
|
| 9 |
Ma O, Angeles J. Optimum design of manipulators under dynamic isotropy conditions. In: Proceedings of the IEEE International Conference on Robotics and Automation. Atlanta: IEEE, 1993, 470–475
|
| 10 |
Huang T, Liu S, Mei J, et al. Optimal design of a 2-dof pick-and-place parallel robot using dynamic performance indices and angular constraints. Mechanism and Machine Theory, 2013, 70(6): 246–253
https://doi.org/10.1016/j.mechmachtheory.2013.07.014
|
| 11 |
Kurazume R, Hasegawa T. A new index of serial-link manipulator performance combining dynamic manipulability and manipulating force ellipsoid. IEEE Transactions on Robotics, 2006, 22(5): 1022–1028
https://doi.org/10.1109/TRO.2006.878949
|
| 12 |
Merlet J P. Jacobian, manipulability, condition number and accuracy of parallel robots. Journal of Mechanical Design, 2006, 128(1): 199–206
https://doi.org/10.1115/1.2121740
|
| 13 |
Liu X, Wang J, Kim J. Determination of the link lengths for a spatial 3-DOF parallel manipulator. ASME Journal of Mechanical Design, 2006, 128(2): 365–373
https://doi.org/10.1115/1.2159028
|
| 14 |
Bowling A, Khatib O. The dynamic capability equations: A new tool for analyzing robotic manipulator performance. IEEE Transactions on Robotics, 2005, 21(1): 115–123
https://doi.org/10.1109/TRO.2004.837243
|
| 15 |
Wang J, Wu C, Liu X. Performance evaluation of parallel manipulators: Motion/force transmissibility and its index. Mechanism and Machine Theory, 2010, 45(10): 1462–1476
https://doi.org/10.1016/j.mechmachtheory.2010.05.001
|
| 16 |
Zhao Y, Gao F. Dynamic formulation and performance evaluation of the redundant parallel manipulator. Robotics and Computer-integrated Manufacturing, 2009, 25(4–5): 770–781
https://doi.org/10.1016/j.rcim.2008.10.001
|
| 17 |
Zhao Y, Gao F. The joint velocity, torque, and power capability evaluation of a redundant parallel manipulator. Robotica, 2011, 29(3): 483–493
https://doi.org/10.1017/S0263574710000330
|
| 18 |
Wu J, Gao Y, Zhang B, et al. Workspace and dynamic performance evaluation of the parallel manipulators in a spray-painting equipment. Robotics and Computer-Integrated Manufacturing, 2017, 44: 199–207
https://doi.org/10.1016/j.rcim.2016.09.002
|
| 19 |
Sugimoto K. Kinematic and dynamic analysis of parallel manipulators by means of motor algebra. Journal of Mechanisms, Transmissions, and Automation in Design, 1987, 109(1): 3–7
https://doi.org/10.1115/1.3258783
|
| 20 |
Yang J, Yu D, Wang J. Modular computational method for inverse dynamics of planar 3-DOF parallel manipulators. Journal of Tsinghua University (Science and Technology), 2004, 44(8): 1043–1046 (in Chinese)
|
| 21 |
Jiang Y, Li T, Wang L. The dynamic modeling, redundant-force optimization, and dynamic performance analyses of a parallel kinematic machine with actuation redundancy. Robotica, 2015, 33(2): 241–263
https://doi.org/10.1017/S0263574714000265
|
| 22 |
Liu K, Lewis F, Lebret G, et al. The singularities and dynamics of a Stewart platform manipulator. Journal of Intelligent & Robotic Systems, 1993, 8(3): 287–308
https://doi.org/10.1007/BF01257946
|
| 23 |
Miller K, Clavel R. The Lagrange-based model of Delta-4 robot dynamics. Robotersysteme, 1992, 8(1): 49–54
|
| 24 |
Wang Q, Wang J, Liu X, et al. Dynamic modeling of a parallel manipulator with two translational degrees of freedom. Journal of Tsinghua University (Science and Technology), 2002, 42(11): 1469–1472 (in Chinese)
|
| 25 |
Staicu S, Liu X, Wang J. Inverse dynamics of the HALF parallel manipulator with revolute actuators. Nonlinear Dynamics, 2007, 50(1–2): 1–12
https://doi.org/10.1007/s11071-006-9138-5
|
| 26 |
Staicu S, Liu X, Li J. Explicit dynamics equations of the constrained robotic systems. Nonlinear Dynamics, 2009, 58(1–2): 217–235
https://doi.org/10.1007/s11071-009-9473-4
|
| 27 |
Kong M, Chen Z, Ji C, et al. Optimal point-to-point motion planning of flexible parallel manipulator with adaptive Gauss pseudo-spectral method. In: Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Besacon: IEEE, 2014, 852–858
|
| 28 |
Feng L, Zhang W, Gong Z, et al. Developments of Delta-like parallel manipulators—A review. Robot, 2014, 36(3): 375–384
|
| 29 |
Codourey A. Dynamic modeling of parallel robots for computed-torque control implementation. International Journal of Robotics Research, 1998, 17(12): 1325–1336
https://doi.org/10.1177/027836499801701205
|
| 30 |
Pierrot F, Nabat V, Company O, et al.Optimal design of a 4-dof parallel manipulator: from academia to industry. IEEE Transactions on Robotics, 2009, 25(2): 213–224
https://doi.org/10.1109/TRO.2008.2011412
|
| 31 |
Halevi Y, Carpanzano E, Montalbano G, et al.Minimum energy control of redundant actuation machine tools. CIRP Annals-Manufacturing Technology, 2011, 60(1): 433–436
https://doi.org/10.1016/j.cirp.2011.03.032
|
| 32 |
Lee G, Park S, Lee D, et al.Minimizing energy consumption of parallel mechanisms via redundant actuation. IEEE/ASME Transactions on Mechatronics, 2015, 20(6): 2805–2812
https://doi.org/10.1109/TMECH.2015.2401606
|
| 33 |
Xie F, Liu X. Design and development of a high-speed and high-rotation robot with four identical arms and a single platform. Journal of Mechanisms and Robotics, 2015, 7(4): 041015
https://doi.org/10.1115/1.4029440
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|