|
|
|
Robust cooperation of connected vehicle systems with eigenvalue-bounded interaction topologies in the presence of uncertain dynamics |
Keqiang LI1, Feng GAO2( ), Shengbo Eben LI1(), Yang ZHENG3, Hongbo GAO1 ), Shengbo Eben LI1(), Yang ZHENG3, Hongbo GAO1 |
1. State Key Laboratory of Automotive Safety and Energy, Department of Automotive Engineering, Tsinghua University, Beijing 100084, China
2. School of Automotive Engineering, Chongqing University, Chongqing 400044, China
3. Department of Engineering Science, University of Oxford, Oxford OX13PJ, UK |
|
|
|
|
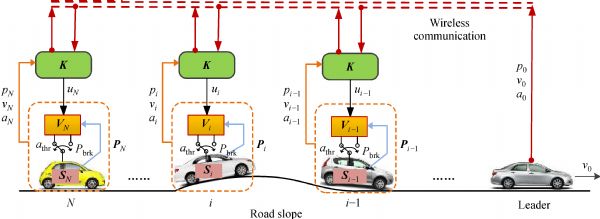
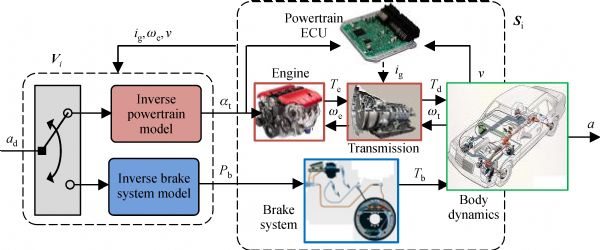
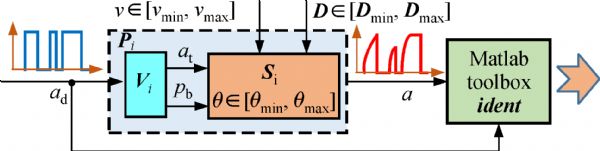
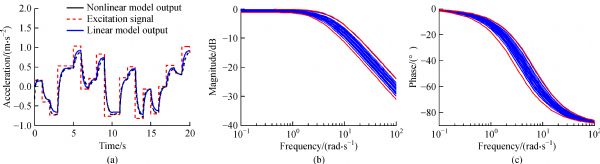
Abstract This study presents a distributed H-infinity control method for uncertain platoons with dimensionally and structurally unknown interaction topologies provided that the associated topological eigenvalues are bounded by a predesigned range. With an inverse model to compensate for nonlinear powertrain dynamics, vehicles in a platoon are modeled by third-order uncertain systems with bounded disturbances. On the basis of the eigenvalue decomposition of topological matrices, we convert the platoon system to a norm-bounded uncertain part and a diagonally structured certain part by applying linear transformation. We then use a common Lyapunov method to design a distributed H-infinity controller. Numerically, two linear matrix inequalities corresponding to the minimum and maximum eigenvalues should be solved. The resulting controller can tolerate interaction topologies with eigenvalues located in a certain range. The proposed method can also ensure robustness performance and disturbance attenuation ability for the closed-loop platoon system. Hardware-in-the-loop tests are performed to validate the effectiveness of our method.
|
| Keywords
automated vehicles
platoon
distributed control
robustness
|
|
Corresponding Author(s):
Feng GAO,Shengbo Eben LI
|
|
Just Accepted Date: 15 November 2017
Online First Date: 26 December 2017
Issue Date: 11 June 2018
|
|
| 1 |
Zhang J, Wang F, Wang K, et al.. Data-driven intelligent transportation systems: A survey. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1624–1639
https://doi.org/10.1109/TITS.2011.2158001
|
| 2 |
Luettel T, Himmelsbach M, Wuensche J. Autonomous ground vehicles—Concepts and a path to the future. Proceedings of the IEEE, 2012, 100(Special Centennial Issue): 1831–1839
https://doi.org/10.1109/JPROC.2012.2189803
|
| 3 |
Caveney D. Cooperative vehicular safety applications. IEEE Control Systems Magazine, 2010, 30(4): 38–53
https://doi.org/10.1109/MCS.2010.937003
|
| 4 |
Shladover S, Desoer C, Hedrick J, et al.. Automated vehicle control developments in the PATH program. IEEE Transactions on Vehicular Technology, 1991, 40(1): 114–130
https://doi.org/10.1109/25.69979
|
| 5 |
Rajamani R, Tan H, Law B, et al.. Demonstration of integrated lateral and longitudinal control for the operation of automated vehicles in platoons. IEEE Transactions on Control Systems Technology, 2000, 8(4): 695–708
https://doi.org/10.1109/87.852914
|
| 6 |
Swaroop D, Hedrick J K, Chien C C, et al.. A comparison of spacing and headway control laws for automatically controlled vehicles. Vehicle System Dynamics, 1994, 23(8): 597–625
https://doi.org/10.1080/00423119408969077
|
| 7 |
Zhou J, Peng H. Range policy of adaptive cruise control vehicle for improved flow stability and string stability. IEEE Transactions on Intelligent Transportation Systems, 2005, 6(2): 229–237
https://doi.org/10.1109/TITS.2005.848359
|
| 8 |
Swaroop D, Hedrick J. Constant spacing strategies for platooning in automated highway systems. Journal of Dynamic Systems, Measurement, and Control, 1999, 121(3): 462–470
https://doi.org/10.1115/1.2802497
|
| 9 |
Fax A, Murray R. Information flow and cooperative control of vehicle formations. IEEE Transactions on Automatic Control, 2004, 49: 1465–1476
https://doi.org/10.1109/TAC.2004.834433
|
| 10 |
Yadlapalli S K, Darbha S, Rajagopal K R. Information flow and its relation to stability of the motion of vehicles in a rigid formation. In: Proceedings of the 2005 American Control Conference. Portland: IEEE, 2006, 1315–1319
https://doi.org/10.1109/ACC.2005.1470238
|
| 11 |
Zheng Y, Li S, Wang J, et al.. Influence of information flow topology on closed-loop stability of vehicle platoon with rigid formation. In: Proceedings of the 17th International Conference on Intelligent Transportation System. Qingdao: IEEE, 2014, 2094–2100
https://doi.org/10.1109/ITSC.2014.6958012
|
| 12 |
Xiao L, Cao F. Practical string stability of platoon of adaptive cruise control vehicles. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(4): 1184–1194
https://doi.org/10.1109/TITS.2011.2143407
|
| 13 |
Teo R, Stipanovic D, Tomlin C. Decentralized spacing control of a string of multiple vehicles over lossy data links. IEEE Transactions on Control Systems Technology, 2010, 18(2): 469–473
https://doi.org/10.1109/TCST.2009.2016109
|
| 14 |
Shaw E, Hedrick J. String stability analysis for heterogeneous vehicle strings. In: Proceedings of the 2007 American Control Conference. New York: IEEE, 2007, 3118–3125
https://doi.org/10.1109/ACC.2007.4282789
|
| 15 |
Zheng Y, Li S E, Li K, et al.Distributed model predictive control for heterogeneous vehicle platoons under unidirectional topologies. IEEE Transactions on Control Systems Technology, 2017, 25(3): 899–910
https://doi.org/10.1109/TCST.2016.2594588
|
| 16 |
Liang C, Peng H. Optimal adaptive cruise control with guaranteed string stability. Vehicle System Dynamics, 1999, 32(4–5): 313–330
|
| 17 |
Stankovic S, Stanojevic M, Siljak D. Decentralized overlapping control of a platoon of vehicles. IEEE Transactions on Control Systems Technology, 2000, 8(5): 816–831
https://doi.org/10.1109/87.865854
|
| 18 |
Dunbar W, Caveney D. Distributed receding horizon control of vehicle platoons: Stability and string stability. IEEE Transactions on Automatic Control, 2012, 57(3): 620–633
https://doi.org/10.1109/TAC.2011.2159651
|
| 19 |
Zheng Y, Li S E, Li K, et al.. Stability margin improvement of vehicular platoon considering undirected topology and asymmetric control. IEEE Transactions on Control Systems Technology, 2016, 24(4): 1253–1265
https://doi.org/10.1109/TCST.2015.2483564
|
| 20 |
Kianfar R, Augusto B, Ebadighajari A, et al.. Design and experimental validation of a cooperative driving system in the grand cooperative driving challenge. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(3): 994–1007
https://doi.org/10.1109/TITS.2012.2186513
|
| 21 |
Chan E, Gilhead P, Jelinek P, et al.. Cooperative control of SARTRE automated platoon vehicles. In: Proceedings of the 19th ITS World Congress. Vienna, 2012, 1–9
|
| 22 |
Tsugawa S, Kato S, Aoki K. An automated truck platoon for energy saving. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco: IEEE, 2011, 32(14): 4109–4114
https://doi.org/10.1109/IROS.2011.6094549
|
| 23 |
Zheng Y, Li S, Wang J, et al.. Stability and scalability of homogeneous vehicular platoon: Study on the influence of information flow topologies. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(1): 14–26
https://doi.org/10.1109/TITS.2015.2402153
|
| 24 |
Willke T, Tientrakool P, Maxemchuk N F. A survey of inter-vehicle communication protocols and their applications. IEEE Communications Surveys & Tutorials, 2009, 11(2): 3–20
https://doi.org/10.1109/SURV.2009.090202
|
| 25 |
Ploeg J, Serrarens A, Heijenk G. Connect & drive: Design and evaluation of cooperative adaptive cruise control for congestion reduction. Journal of Modern Transportation, 2011, 19(3): 207–213
|
| 26 |
Guo G, Yue W. Autonomous platoon control allowing range-limited sensors. IEEE Transactions on Vehicular Technology, 2012, 61(7): 2901–2912
https://doi.org/10.1109/TVT.2012.2203362
|
| 27 |
Herman I, Martinec D, Hurak Z, et al.. Nonzero bound on Fiedler eigenvalue causes exponential growth of H-infinity norm of vehicular platoon. IEEE Transactions on Automatic Control, 2015, 60(8): 2248–2253
https://doi.org/10.1109/TAC.2014.2366980
|
| 28 |
Naus G J L, Vugts R P A, Ploeg J, et al.. String-stable CACC design and experimental validation: A frequency-domain approach. IEEE Transactions on Vehicular Technology, 2010, 59(9): 4268–4279
https://doi.org/10.1109/TVT.2010.2076320
|
| 29 |
Gao F, Li K. Hierarchical switching control of longitudinal acceleration with large uncertainties. International Journal of Automotive Technology, 2007, 8(3): 351–359
|
| 30 |
Li S, Gao F, Cao D, et al.Multiple model switching control of vehicle longitudinal dynamics for platoon level automation. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4480–4492
https://doi.org/10.1109/TVT.2016.2541219
|
| 31 |
Hu G. Robust consensus tracking of a class of second-order multi-agent dynamic systems. Systems & Control Letters, 2012, 61(1): 134–142
https://doi.org/10.1016/j.sysconle.2011.10.004
|
| 32 |
Han D, Chesi G, Hung Y. Robust consensus for a class of uncertain multi-agent dynamical systems. IEEE Transactions on Industrial Informatics, 2013, 9(1): 306–312
https://doi.org/10.1109/TII.2012.2217971
|
| 33 |
Huang W, Zeng J, Sun H. Robust consensus for linear multi-agent systems with mixed uncertainties. Systems & Control Letters, 2015, 76: 56–65
https://doi.org/10.1016/j.sysconle.2014.12.005
|
| 34 |
Gao F, Li S, Zheng Y, et al.Robust control of heterogeneous vehicular platoon with uncertain dynamics and communication delay. IET Intelligent Transport Systems, 2016, 10(7): 503–513
https://doi.org/10.1049/iet-its.2015.0205
|
| 35 |
Gao F, Dang D, Huang S, Li S. Decoupled robust control of vehicular platoon with identical controller and rigid information flow. International Journal of Automotive Technology, 2017, 18(1): 157–164
|
| 36 |
Ren W, Beard R. Consensus seeking in multi-agent systems under dynamically changing interaction topologies. IEEE Transactions on Automatic Control, 2005, 50(5): 655–661
https://doi.org/10.1109/TAC.2005.846556
|
| 37 |
Godsil C, Royle G F. Algebraic Graph Theory. Springer Science & Business Media, 2013.
|
| 38 |
Zheng Y, Li S E, Li K, et al.Platooning of connected vehicles with undirected topologies: robustness analysis and distributed H-infinity controller synthesis. IEEE Transactions on Intelligent Transportation Systems, 2016, PP(99): 1–12
|
| 39 |
Zhang L, Orosz G. Motif-based design for connected vehicle systems in presence of heterogeneous connectivity structures and time delays. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(6): 1638–1651
https://doi.org/10.1109/TITS.2015.2509782
|
| 40 |
Gao F, Li S, Kum D, et al.Synthesis of multiple model switching controllers using H-inf theory for systems with large uncertainties. Neurocomputing, 2015, 157: 118–124
https://doi.org/10.1016/j.neucom.2015.01.029
|
| 41 |
Gao F, Dang D, Li S, et al.Control of large model mismatch system using multiple models. International Journal of Control Automation and Systems, 2017, 15(4): 1494–1506
https://doi.org/10.1007/s12555-016-0093-8
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|