|
|
|
Dimensional synthesis of a novel 5-DOF reconfigurable hybrid perfusion manipulator for large-scale spherical honeycomb perfusion |
Hui YANG1, Hairong FANG1( ), Yuefa FANG1, Xiangyun LI2 ), Yuefa FANG1, Xiangyun LI2 |
1. School of Mechanical Engineering, Beijing Jiaotong University, Beijing 100044, China
2. School of Mechanical Engineering, Southwest Jiaotong University, Chengdu 610031, China |
|
|
|
|
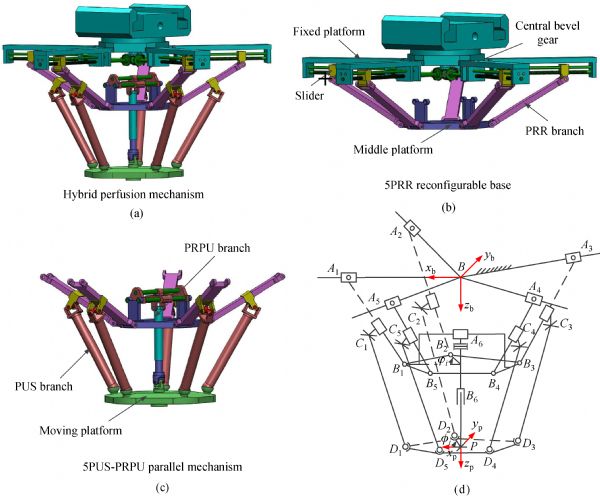
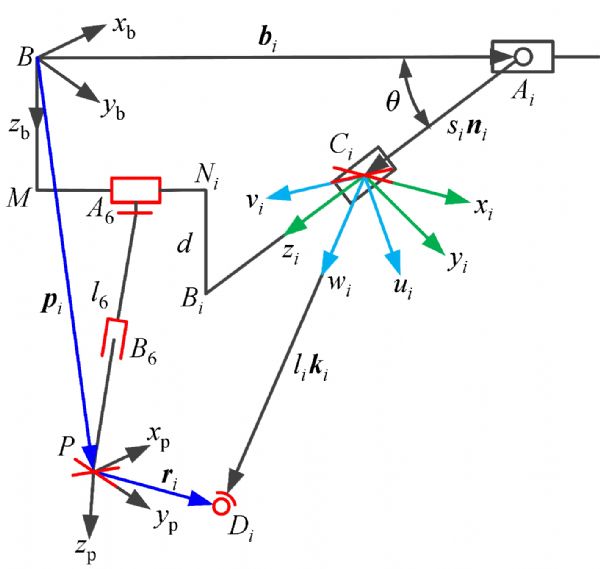
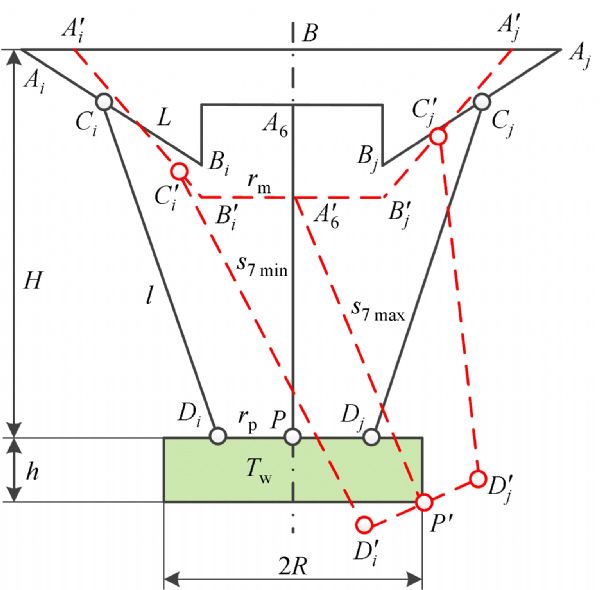
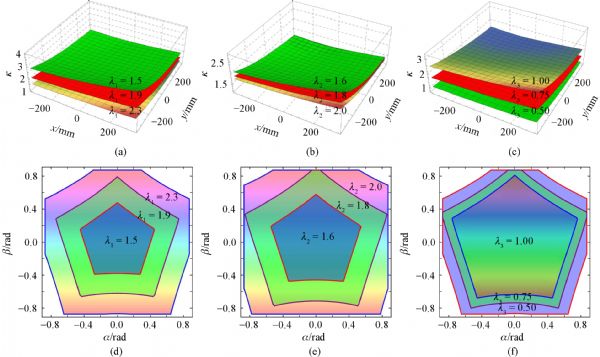
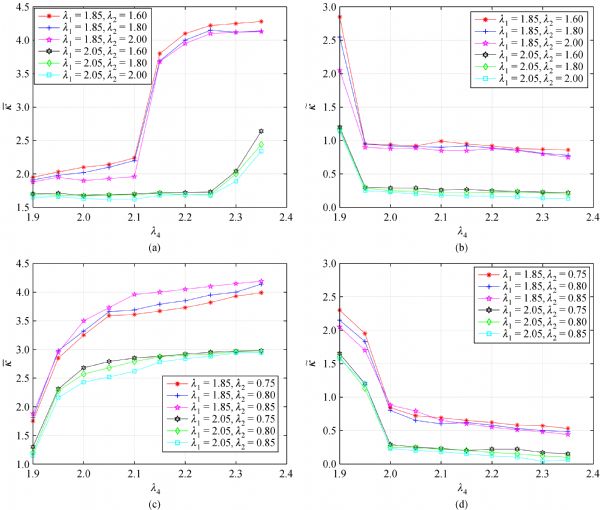
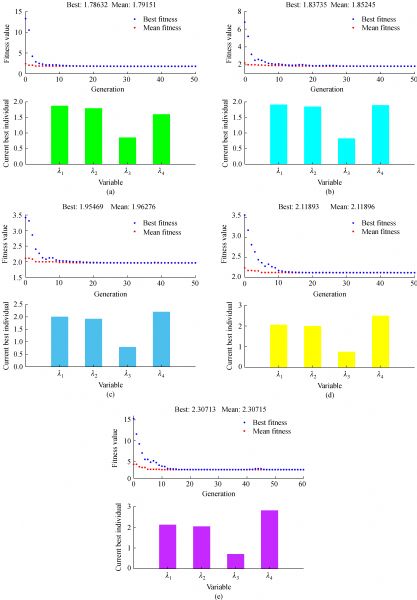
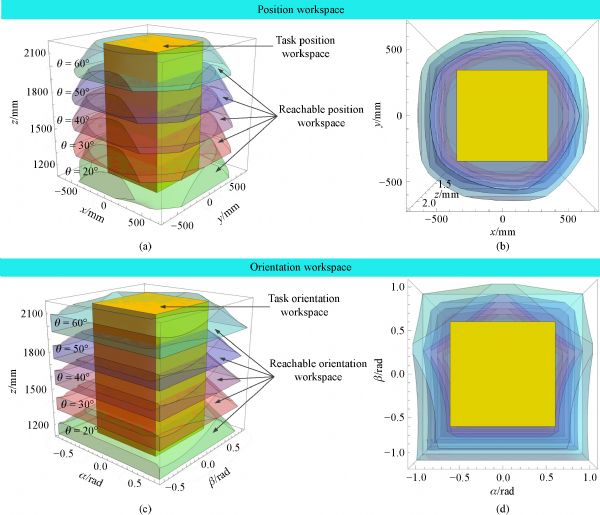
Abstract A novel hybrid perfusion manipulator (HPM) with five degrees of freedom (DOFs) is introduced by combining the 5PUS-PRPU (P, R, U, and S represent prismatic, revolute, universal, and spherical joint, respectively) parallel mechanism with the 5PRR reconfigurable base to enhance the perfusion efficiency of the large-scale spherical honeycomb thermal protection layer. This study mainly presents the dimensional synthesis of the proposed HPM. First, the inverse kinematics, including the analytic expression of the rotation angles of the U joint in the PUS limb, is obtained, and mobility analysis is conducted based on screw theory. The Jacobian matrix of 5PUS-PRPU is also determined with screw theory and used for the establishment of the objective function. Second, a global and comprehensive objective function (GCOF) is proposed to represent the Jacobian matrix’s condition number. With the genetic algorithm, dimensional synthesis is conducted by minimizing GCOF subject to the given variable constraints. The values of the designed variables corresponding to different configurations of the reconfigurable base are then obtained. Lastly, the optimal structure parameters of the proposed 5-DOF HPM are determined. Results show that the HPM with the optimized parameters has an enlarged orientation workspace, and the maximum angle of the reconfigurable base is decreased, which is conducive to improving the overall stiffness of HPM.
|
| Keywords
5-DOF hybrid manipulator
reconfigurable base
large workspace
dimensional synthesis
optimal design
|
|
Corresponding Author(s):
Hairong FANG
|
|
Just Accepted Date: 18 December 2020
Online First Date: 18 January 2021
Issue Date: 11 March 2021
|
|
| 1 |
P k Ackerman, A L Baker, , C W Newquist. US Patent 5322725, 1994-6-21
|
| 2 |
C Gogu, S K Bapanapalli, R T Haftka, et al.Comparison of materials for an integrated thermal protection system for spacecraft reentry. Journal of Spacecraft and Rockets, 2009, 46(3): 501–513
https://doi.org/10.2514/1.35669
|
| 3 |
R B Erb, D H Greenshields, L T Chauvin, et al. Apollo thermal-protection system development. Journal of Spacecraft and Rockets, 2015, 7(1): 839–869
|
| 4 |
D Wu, A Zhou, L Zheng, et al.Study on the thermal protection performance of superalloy honeycomb panels in high-speed thermal shock environments. Theoretical & Applied Mechanics Letters, 2014, 4(2): 19–26
https://doi.org/10.1063/2.1402104
|
| 5 |
J P Merlet. Parallel Robots. Dordrecht: Kluwer Academic Publishers, 2000
|
| 6 |
Y Liu, L Wang, J Wu, et al.A comprehensive analysis of a 3-P(Pa)S spatial parallel manipulator. Frontiers of Mechanical Engineering, 2015, 10(1): 7–19
https://doi.org/10.1007/s11465-015-0324-3
|
| 7 |
A Chaker, A Mlika, M A Laribi, et al.Synthesis of spherical parallel manipulator for dexterous medical task. Frontiers of Mechanical Engineering, 2012, 7(2): 150–162
https://doi.org/10.1007/s11465-012-0325-4
|
| 8 |
W Dong, Z Du, Y Xiao, et al.Development of a parallel kinematic motion simulator platform. Mechatronics, 2013, 23(1): 154–161
https://doi.org/10.1016/j.mechatronics.2012.10.004
|
| 9 |
S Guo, D Li, H Chen, et al.. Design and kinematic analysis of a novel flight simulator mechanism. In: Proceedings of 2014 International Conference on Intelligent Robotics and Applications (ICIRA). Guangzhou: Springer, 2014, 23–34
https://doi.org/10.1007/978-3-319-13966-1_3
|
| 10 |
G Wu, S Bai, P Hjørnet. Architecture optimization of a parallel Schönflies-motion robot for pick-and-place applications in a predefined workspace. Mechanism and Machine Theory, 2016, 106: 148–165
https://doi.org/10.1016/j.mechmachtheory.2016.09.005
|
| 11 |
J Mo, Z Shao, L Guan, et al.Dynamic performance analysis of the X4 high-speed pick-and-place parallel robot. Robotics and Computer-Integrated Manufacturing, 2017, 46: 48–57
https://doi.org/10.1016/j.rcim.2016.11.003
|
| 12 |
J Wu, Y Gao, B Zhang, et al.Workspace and dynamic performance evaluation of the parallel manipulators in a spray-painting equipment. Robotics and Computer-Integrated Manufacturing, 2017, 44: 199–207
https://doi.org/10.1016/j.rcim.2016.09.002
|
| 13 |
B Zhang, J Wu, L Wang, et al.Accurate dynamic modeling and control parameters design of an industrial hybrid spray-painting robot. Robotics and Computer-Integrated Manufacturing, 2020, 63: 101923
https://doi.org/10.1016/j.rcim.2019.101923
|
| 14 |
F Xie, X Liu, J A Wang. 3-DOF parallel manufacturing module and its kinematic optimization. Robotics and Computer-Integrated Manufacturing, 2012, 28(3): 334–343
https://doi.org/10.1016/j.rcim.2011.10.003
|
| 15 |
T Sun, Y Song, G Dong, et al.Optimal design of a parallel mechanism with three rotational degrees of freedom. Robotics and Computer-Integrated Manufacturing, 2012, 28(4): 500–508
https://doi.org/10.1016/j.rcim.2012.02.002
|
| 16 |
H Yang, H Fang, Q J Ge, et al.. On the kinematic performance of a novel 5-DOF reconfigurable hybrid manipulator with ultra large workspace for automatic perfusion of a large-scale spherical honeycomb structure. In: Proceedings of 2019 ASME International Design Engineering Technical Conferences (IDETC). Anaheim: ASME, 2019, 1–9
https://doi.org/10.1115/DETC2019-97678
|
| 17 |
X Liu. Optimal kinematic design of a three translational DoFs parallel manipulator. Robotica, 2006, 24(2): 239–250
https://doi.org/10.1017/S0263574705002079
|
| 18 |
X Liu, J Li, Y Zhou. Kinematic optimal design of a 2-degree-of-freedom 3-parallelogram planar parallel manipulator. Mechanism and Machine Theory, 2015, 87: 1–17
https://doi.org/10.1016/j.mechmachtheory.2014.12.014
|
| 19 |
X Liu, X Chen, Z Li. Modular design of typical rigid links in parallel kinematic machines: Classification and topology optimization. Frontiers of Mechanical Engineering, 2012, 7(2): 199–209
https://doi.org/10.1007/s11465-012-0315-6
|
| 20 |
H Shin, S Lee, J I Jeong, et al.Antagonistic stiffness optimization of redundantly actuated parallel manipulators in a predefined workspace. IEEE/ASME Transactions on Mechatronics, 2013, 18(3): 1161–1169
https://doi.org/10.1109/TMECH.2012.2198224
|
| 21 |
X Liu, J Wang. A new methodology for optimal kinematic design of parallel mechanisms. Mechanism and Machine Theory, 2007, 42(9): 1210–1224
https://doi.org/10.1016/j.mechmachtheory.2006.08.002
|
| 22 |
L Wang, H Xu, L Guan. Optimal design of a 3-PUU parallel mechanism with 2R1T DOFs. Mechanism and Machine Theory, 2017, 114: 190–203
https://doi.org/10.1016/j.mechmachtheory.2017.03.008
|
| 23 |
R Kelaiaia, O Company, A Zaatri. Multiobjective optimization of a linear Delta parallel robot. Mechanism and Machine Theory, 2012, 50: 159–178
https://doi.org/10.1016/j.mechmachtheory.2011.11.004
|
| 24 |
X Wan, Q Li, K Wang. Dimensional synthesis of a robotized cell of support fixture. Robotics and Computer-Integrated Manufacturing, 2017, 48: 80–92
https://doi.org/10.1016/j.rcim.2017.03.001
|
| 25 |
O Altuzarra, C Pinto, B Sandru, et al.Optimal dimensioning for parallel manipulators: Workspace, dexterity, and energy. Journal of Mechanical Design, 2011, 133(4): 041007
https://doi.org/10.1115/1.4003879
|
| 26 |
J Wu, X Chen, T Li, et al.Optimal design of a 2-DOF parallel manipulator with actuation redundancy considering kinematics and natural frequency. Robotics and Computer-Integrated Manufacturing, 2013, 29(1): 80–85
https://doi.org/10.1016/j.rcim.2012.07.005
|
| 27 |
Y Qi, T Sun, Y Song. Multi-objective optimization of parallel tracking mechanism considering parameter uncertainty. Journal of Mechanisms and Robotics, 2018, 10(4): 041006
https://doi.org/10.1115/1.4039771
|
| 28 |
J Klein, S Spencer, J Allington, et al.Optimization of a parallel shoulder mechanism to achieve a high-force, low-mass, robotic-arm exoskeleton. IEEE Transactions on Robotics, 2010, 26(4): 710–715
https://doi.org/10.1109/TRO.2010.2052170
|
| 29 |
Y Song, B Lian, T Sun, et al.A novel five-degree-of-freedom parallel manipulator and its kinematic optimization. Journal of Mechanisms and Robotics, 2014, 6(4): 041008
https://doi.org/10.1115/1.4027742
|
| 30 |
Y Cheng, D Yu. Optimal design of a parallel bionic eye mechanism. Journal of Mechanisms and Robotics, 2019, 33(2): 879–887
|
| 31 |
M Daneshmand, M H Saadatzi, M H F Kaloorazi, et al.Optimal design of a spherical parallel manipulator based on kinetostatic performance using evolutionary techniques. Journal of Mechanical Science and Technology, 2016, 30(3): 1323–1331
https://doi.org/10.1007/s12206-016-0239-x
|
| 32 |
C Gosselin, J Angeles. A global performance index for the kinematic optimization of robotic manipulators. Journal of Mechanical Design, 1991, 113(3): 220–226
https://doi.org/10.1115/1.2912772
|
| 33 |
T Huang, M Li, X Zhao, et al.Conceptual design and dimensional synthesis for a 3-DOF module of the TriVariant−A novel 5-DOF reconfigurable hybrid robot. IEEE Transactions on Robotics, 2005, 21(3): 449–456
https://doi.org/10.1109/TRO.2004.840908
|
| 34 |
H Liu, T Huang, J Mei, et al.Kinematic design of a 5-DOF hybrid robot with large workspace/limb–stroke ratio. Journal of Mechanical Design, 2007, 129(5): 530–537
https://doi.org/10.1115/1.2712220
|
| 35 |
T Sun, Y Song, Y Li, et al. Workspace decomposition based dimensional synthesis of a novel hybrid reconfigurable robot. Journal of Mechanisms and Robotics, 2010, 2(3): 031009
https://doi.org/10.1115/1.4001781
|
| 36 |
Y Fang, L W Tsai. Structure synthesis of a class of 4-DoF and 5-DoF parallel manipulators with identical limb structures. International Journal of Robotics Research, 2002, 21(9): 799–810
https://doi.org/10.1177/0278364902021009314
|
| 37 |
S A Joshi, L W Tsai. Jacobian analysis of limited-DOF parallel manipulators. Journal of Mechanical Design, 2002, 124(2): 254–258
https://doi.org/10.1115/1.1469549
|
| 38 |
J Angeles. The design of isotropic manipulator architectures in the presence of redundancies. International Journal of Robotics Research, 1992, 11(3): 196–201
https://doi.org/10.1177/027836499201100303
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|