购物车
申请加入邮件组
English
高级检索
图表检索
首页
图书
期刊
首页
图书
期刊
院士风采
作者服务
订购指南
下载中心
音视频讲座
图片集
书刊相关资料
书刊目录
丛书简介
力学基础与工程技术前沿
并联机器人机构学基础
作 者:
刘辛军 谢福贵 汪劲松
ISBN:978-7-04-050604-4 出版时间:2018-11-02
全书目录
本章目录
版权
目录
前辅文
第一篇 构型分类与综合
第1章 并联机器人机构的分类
第2章 并联机器人机构的构型综合
第二篇 性能评价与优化设计
第3章 并联机器人机构的运动/力性能分析及评价
第4章 并联机器人机构的奇异性分析与评价
第5章 并联机器人机构的尺度综合
第三篇 综合设计实例
第6章 5自由度并联加工机器人的运动学设计
第7章 4 自由度并联机器人的运动学设计
附录 旋量理论基础
索引
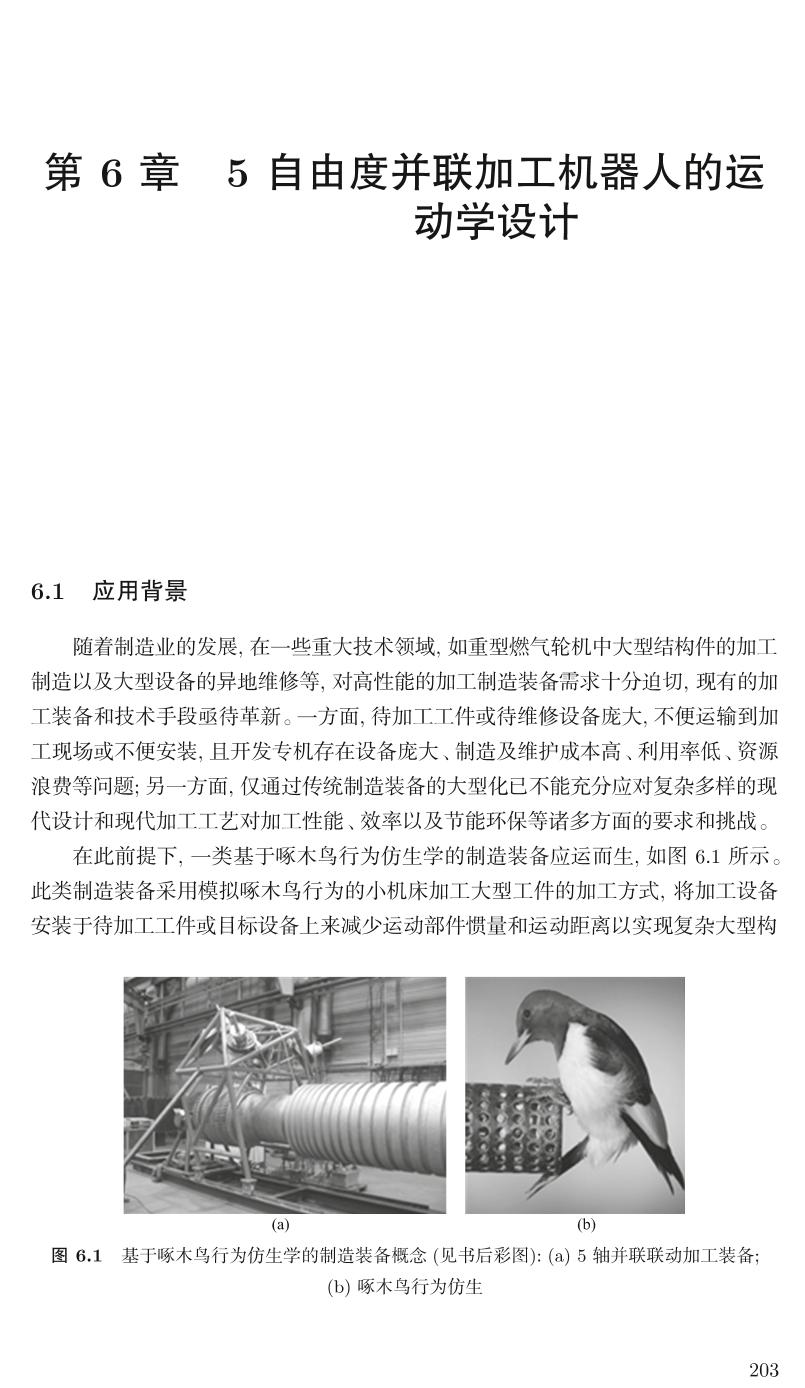
6.1 应用背景
6.2 构型创新设计
6.3 运动学分析
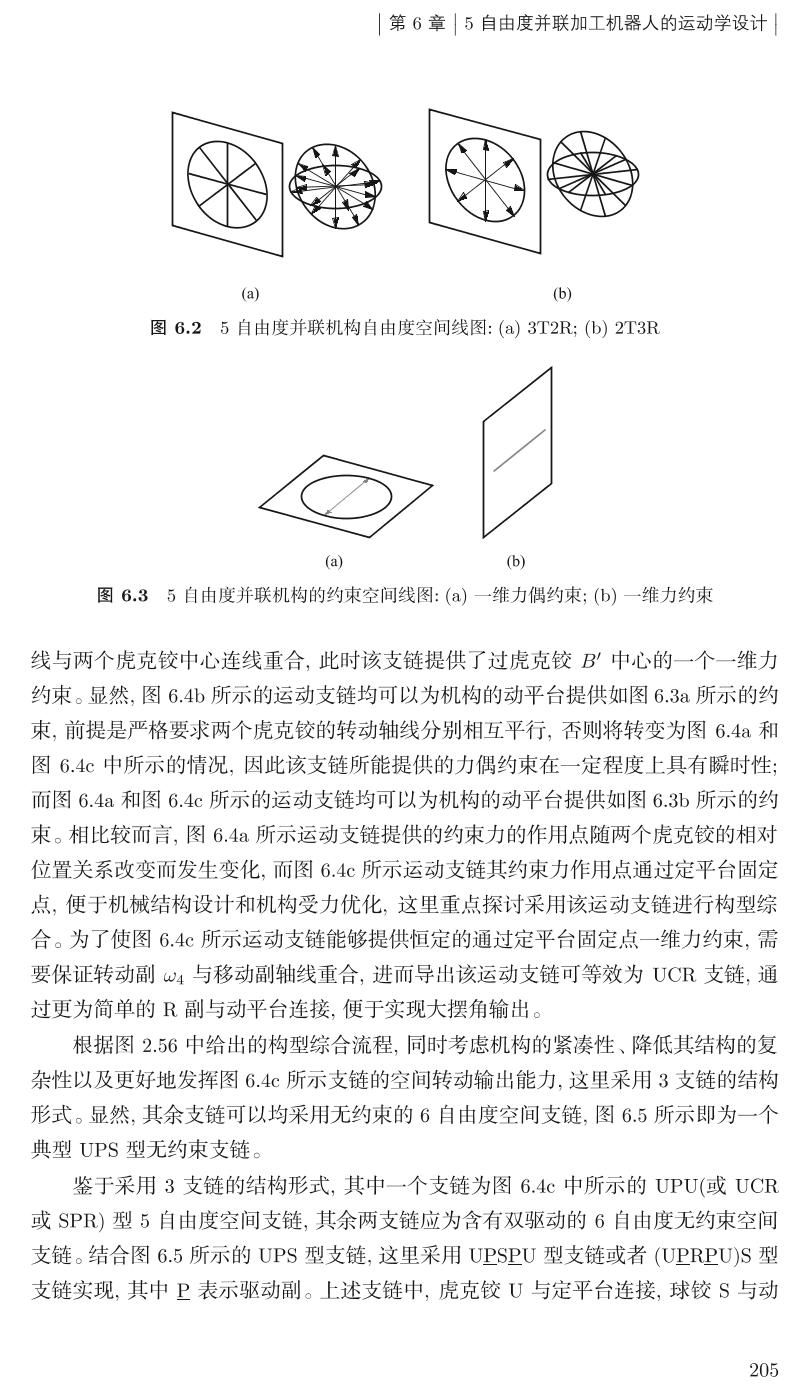
6.3.1 自由度分析与验证
6.3.2 运动学逆解及奇异性分析
6.4 运动学优化设计
6.4.1 参数设计空间
6.4.2 性能评价指标
6.4.3 尺度综合
第6章 5自由度并联加工机器人的运动学设计
PDF在线阅读 (2 MB)
Book Metrics
引用导出
点击:
次
下载:
次
相关资源
相关词条
第6章 5自由度并联加工机器人的运动学设计
引用导出
RIS (for EndNote, Reference Manager, ProCite)
BibTeX
Text