|
|
|
A pneumatic cylinder driving polyhedron mobile mechanism |
Wan DING1, Sung-Chan KIM2, Yan-An YAO1( ) ) |
| 1. School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing 100044, China; 2. Science Institute, Pyongyang Railway University, Pyongyang, Democratic People’s Republic of Korea |
|
|
|
|
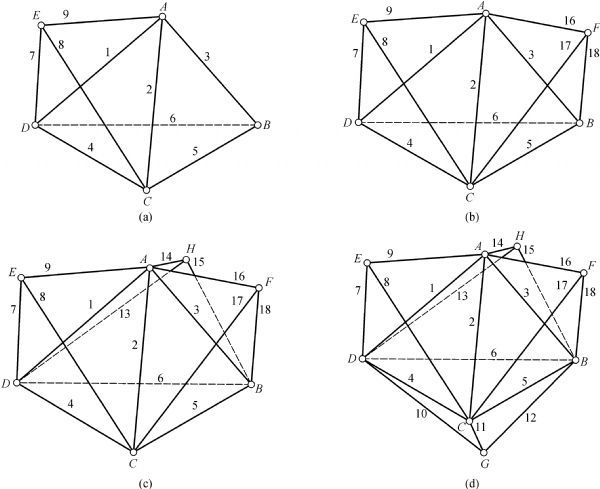
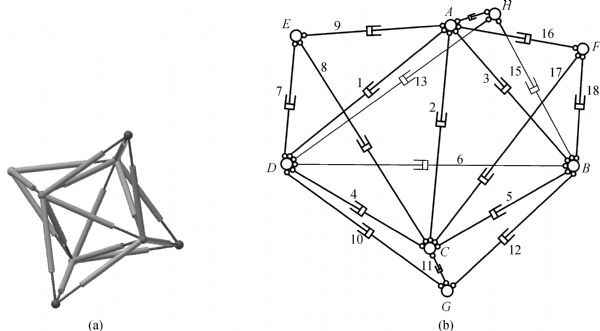
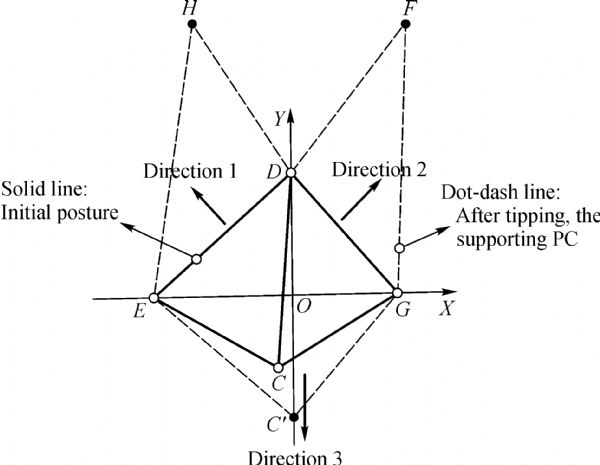
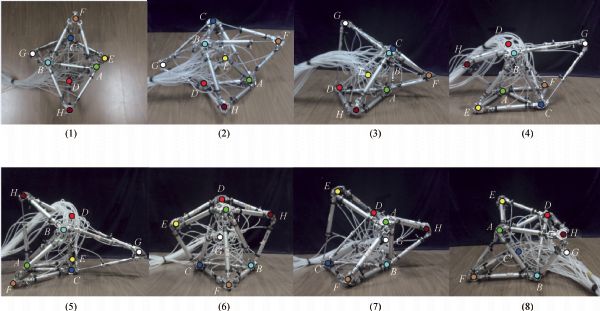
Abstract A novel pneumatic cylinder driving polyhedron mobile mechanism is proposed in this paper. The mechanism is comprised of 5 tetrahedrons which includes a pneumatic cylinder in each edge. It locomotes by rolling and the rolling principle refers to the center of mass (CM) of the mechanism moved out of the supporting area and let it tip over through the controlling of the motion sequence of these cylinders. Firstly, the mathematical model is built to analysis the relation between the configuration and the CM of the mechanism. Then, a binary control strategy is developed to simplify and improve the control of this mobile mechanism. After that, dynamic simulation is performed to testify the analytical validity and feasibility of the rolling gaits. At last, a prototype is fabricated to achieve the rolling successfully to demonstrate the proposed concept.
|
| Keywords
mobile mechanism
polyhedron
cylinder
|
|
Corresponding Author(s):
YAO Yan-An,Email:yayao@bjtu.edu.cn
|
|
Issue Date: 05 March 2012
|
|
| 1 |
Clark P E, Rilee M L, Curtis S A, Truszkowski W, Marr G, Cheung C, Rudisill M. BEES for ANTS: Space mission applications for the autonomous nanotechnology swarm. In: Proceedings of AIAA 1st Intelligent Systems Technical Conference, Illinois, Chicago , 2004, Session 29-IS-13–02
|
| 2 |
Izadi M, Mahjoob M J, Soheilypour M, Vahid-Alizadeh H. A motion planning for toppling-motion of a TET walker. In: Proceedings of the 2nd International Conference on Computer and Automation Engineering (ICCAE) , 2010, 2 : 34–39
|
| 3 |
Zhang L G, Bi S S, Peng Z Q. Motion analysis and simulation of tetrahedral rolling robot. Journal of Beijing University of Aeronautics and Astronautics , 2011, 37(4): 415–420 (in Chinese)
|
| 4 |
Abrahantes M, Littio D, Silver A, Wendt L. Modeling and gait design of a 4-tetrahedron walker robot. 40th Southeastern Symposium on System Theory, New Orleans , 2008, 269–273
|
| 5 |
Abrahantes M, Littio D, Silver A, Wendt L. Gait design and modeling of a 12-tetrahedron walker robot. 39th Southeastern Symposium on System Theory, Macon, GA , 2007, 21–25
|
| 6 |
Steven A C. ANTS as an architectural pathway to artificial life. NASA Goddard Space Flight Center , 2008. http://ants.gsfc.nasa.gov/index.html
|
| 7 |
Lees D S, Chirikjian G S. A combinatorial approach to trajectory planning for binary manipulators. In: Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, Minnesota , 1996, 3: 2749–2754
|
| 8 |
Sujan V A, Lichter M D, Dubowsky S. Lightweight hyper-redundant binary elements for planetary exploration robots. In: Proceedings of the IEEE/ASME Conference on Advanced Intelligent Mechatronics , 2001, 2: 1273–1278 .
|
| 9 |
Sujan V A, Dubowsky S. Design of a lightweight hyper-redundant deployable binary manipulator. Journal of Mechanical Design , 2004, 126(1): 29–39
doi: 10.1115/1.1637647
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|