|
|
|
A feasibility study on the design and walking operation of a biped locomotor via dynamic simulation |
Mingfeng WANG1,*( ),Marco CECCARELLI2,Giuseppe CARBONE2 ),Marco CECCARELLI2,Giuseppe CARBONE2 |
1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China; Laboratory of Robotics and Mechatronics (LARM), DICeM, University of Cassino and South Latium, Cassino 03043, Italy
2. Laboratory of Robotics and Mechatronics (LARM), DICeM, University of Cassino and South Latium, Cassino 03043, Italy |
|
|
|
|
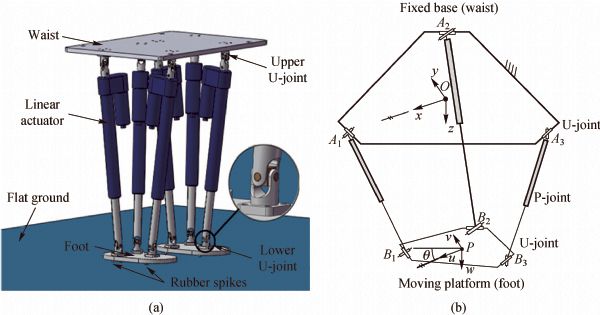
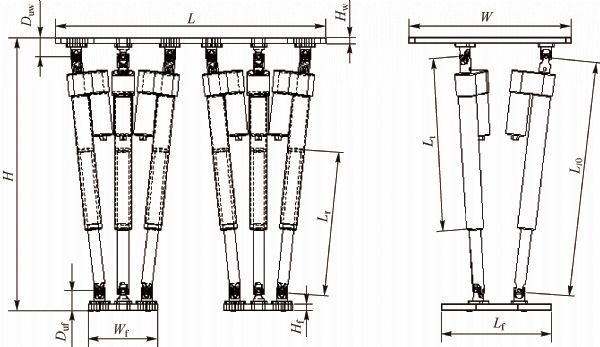
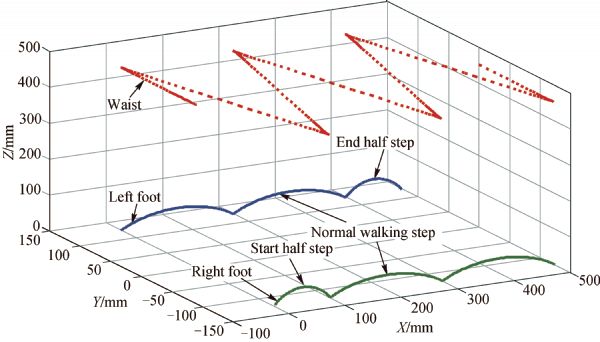
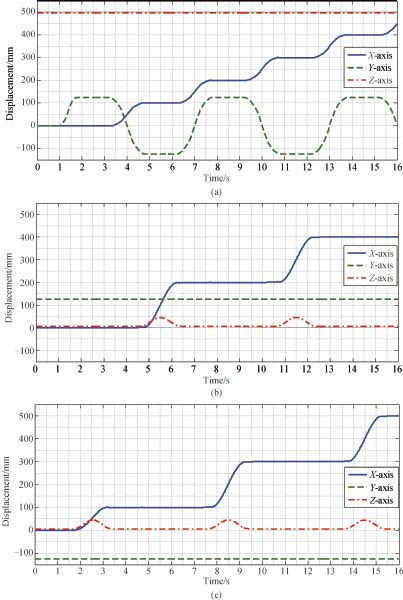
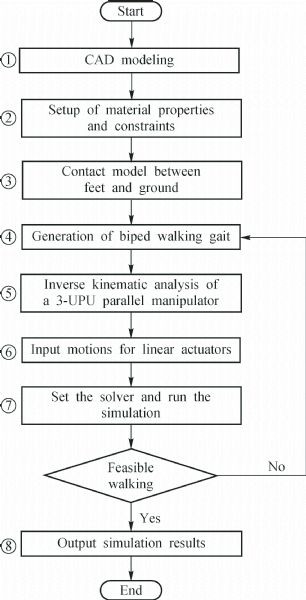
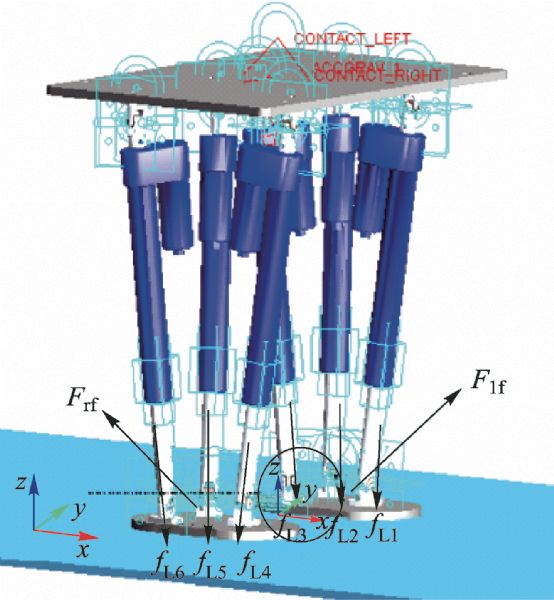
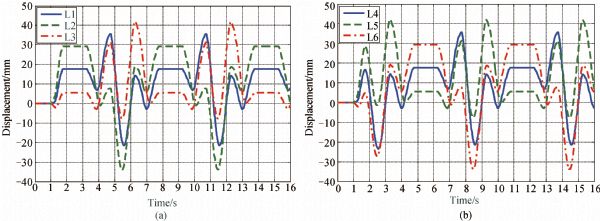
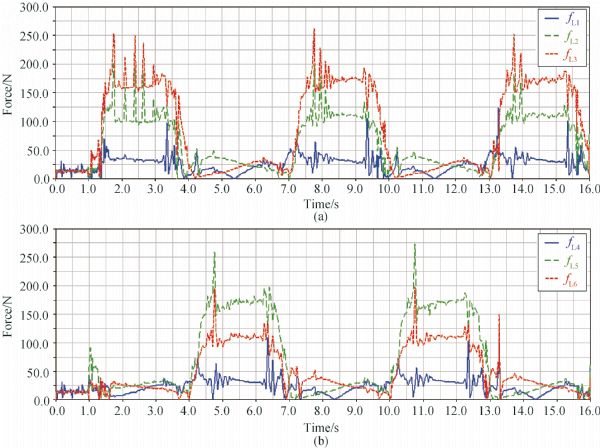
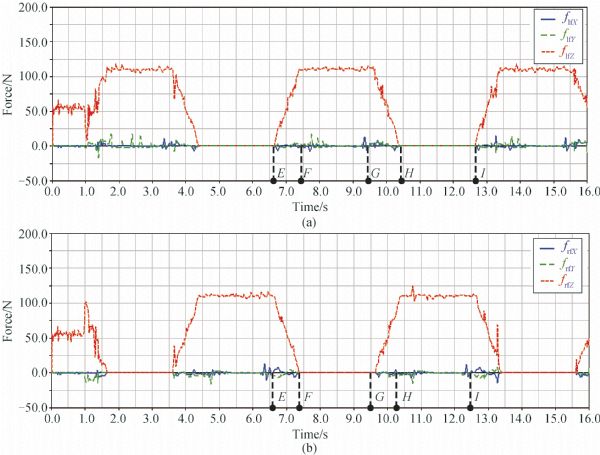
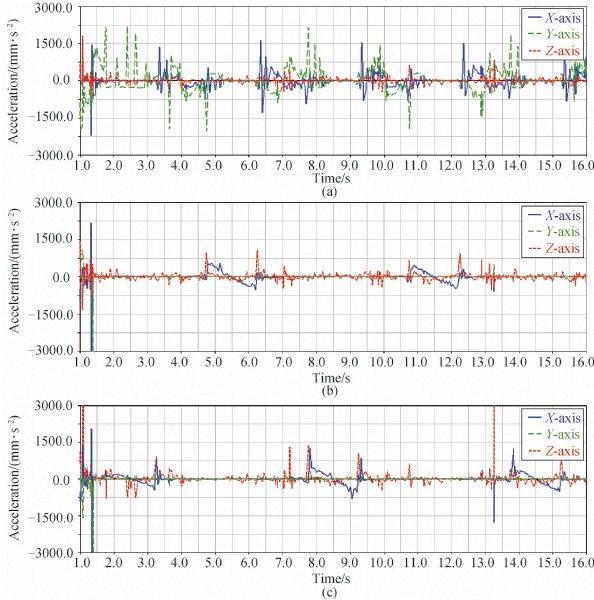
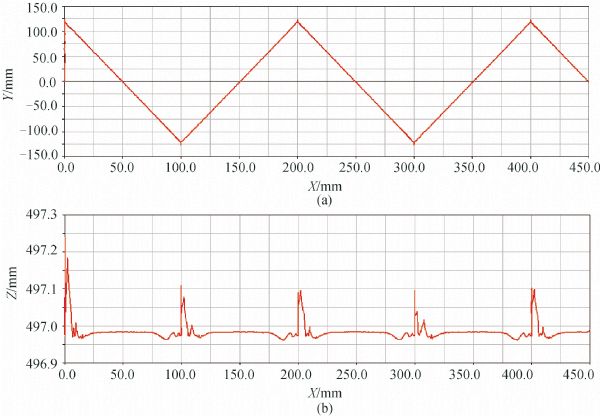
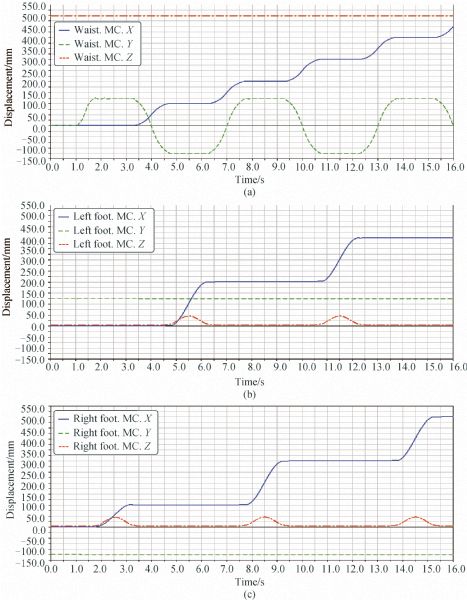
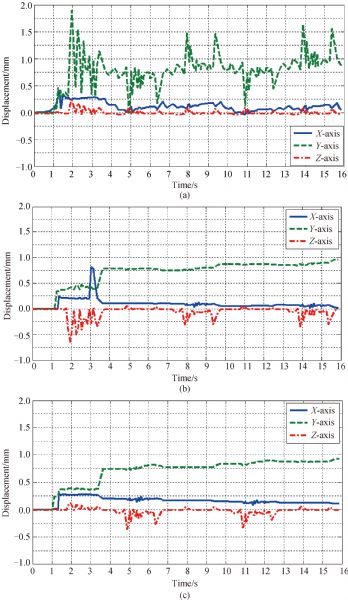
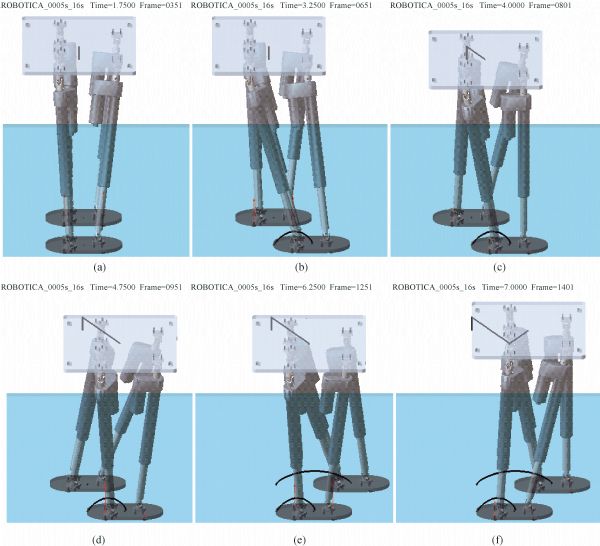
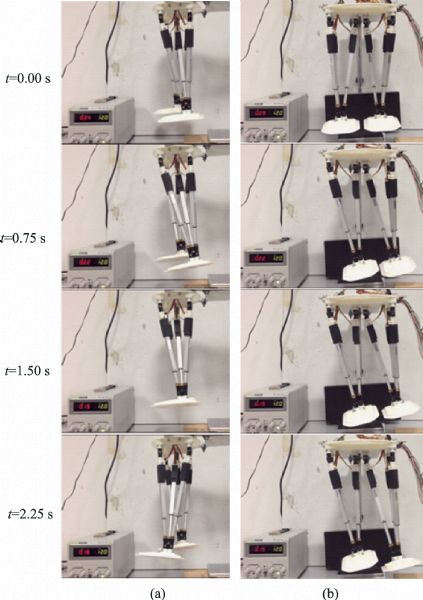
Abstract A feasibility study on the mechanical design and walking operation of a Cassino biped locomotor is presented in this paper. The biped locomotor consists of two identical 3 degrees-of-freedom tripod leg mechanisms with a parallel manipulator architecture. Planning of the biped walking gait is performed by coordinating the motions of the two leg mechanisms and waist. A three-dimensional model is elaborated in SolidWorks® environment in order to characterize a feasible mechanical design. Dynamic simulation is carried out in MSC.ADAMS® environment with the aims of characterizing and evaluating the dynamic walking performance of the proposed design. Simulation results show that the proposed biped locomotor with proper input motions of linear actuators performs practical and feasible walking on flat surfaces with limited actuation and reaction forces between its feet and the ground. A preliminary prototype of the biped locomotor is built for the purpose of evaluating the operation performance of the biped walking gait of the proposed locomotor.
|
| Keywords
feasibility study
biped locomotor
biped walking
mechanical design
dynamic simulation
tripod leg mechanism
3-UPU parallel manipulator
|
|
Corresponding Author(s):
Mingfeng WANG
|
|
Online First Date: 01 June 2016
Issue Date: 29 June 2016
|
|
| 1 |
Pfeiffer F. Technological aspects of walking. In: Pfeiffer F, Zielińska T, eds. Walking: Biological and Technological Aspects.New York: Springer, 2004, 119–153
|
| 2 |
Carbone G, Ceccarelli M. Legged Robotic Systems. Cutting Edge Robotics.Vienna: ARS Scientific Book, 2005, 553–576
|
| 3 |
Siciliano B, Khatib O. Springer Handbook of Robotics.Berlin: Springer, 2008, 361–390
|
| 4 |
Sakagami Y, Watanabe R, Aoyama C, . The intelligent ASIMO: System overview and integration. In: Proceedings of 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’02). Lausanne: IEEE, 2002, 3: 2478–2483
https://doi.org/10.1109/IRDS.2002.1041641
|
| 5 |
Park I W, Kim J Y, Lee J, . Mechanical design of humanoid robot platform KHR-3 (KAIST humanoid robot-3: HUBO). In: Proceedings of IEEE/RAS International Conference on Humanoid Robots (Humanoids’05). Tsukuba: IEEE, 2005, 321–326
|
| 6 |
Kaneko K, Kanehiro F, Kajita S, . Design of prototype humanoid robotics platform for HRP. In: Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’02). Lausanne: IEEE, 2002, 3: 2431–2436
https://doi.org/10.1109/IRDS.2002.1041632
|
| 7 |
Ceccarelli M. Fundamentals of Mechanics of Robotic Manipulation.Dordrecht: Kluwer AcademicPublishers, 2004
|
| 8 |
Merlet J P. Parallel Robots.<Date>2nd ed</Date>. Dordrecht: Springer, 2006
|
| 9 |
Hashimoto K, Sugahara Y, Lim H O, . Biped landing pattern modification method and walking experiments in outdoor environment. Journal of Robotics and Mechatronics, 2009, 20(5): 775–784
|
| 10 |
Wang H, Qi Z, Hu Z, . Application of parallel leg mechanisms in quadruped/biped reconfigurable walking robot. Journal of Mechanical Engineering, 2009, 45(08): 24–30 (in Chinese)
https://doi.org/10.3901/JME.2009.08.024
|
| 11 |
Ceccarelli M, Carbone G. A new leg design with parallel mechanism architecture. In: Proceedings of 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM’09). Singapore: IEEE, 2009, 1447–1452
https://doi.org/10.1109/AIM.2009.5229859
|
| 12 |
Pan Y, Gao F. Payload capability analysis of a new kind of parallel leg hexapod walking robot. In: Proceedings of 2013 International Conference on Advanced Mechatronic Systems (ICAMechS’13). Luoyang: IEEE, 2013, 541–544
https://doi.org/10.1109/ICAMechS.2013.6681703
|
| 13 |
Wang M, Ceccarelli M. Design and simulation for kinematic characteristics of a tripod mechanism for biped locomotors robots. In: Proceedings of International Workshop on Robotics in Alpe-Adria-Danube Region (RAAD’13). Portorož, 2013, 124–131
|
| 14 |
Wang M, Ceccarelli M, Carbone G. Experimental tests on operation performance of a LARM leg mechanism with 3-DOF parallel architecture. Mechanical Sciences, 2015, 6(1): 1–8
https://doi.org/10.5194/ms-6-1-2015
|
| 15 |
Joshi S, Tsai L W. A comparison study of two 3-DOF parallel manipulators: One with three and the other with four supporting legs. IEEE Transactions on Robotics and Automation, 2003, 19(2): 200–209
https://doi.org/10.1109/TRA.2003.808857
|
| 16 |
Bhutani G, Dwarakanath T A. Practical feasibility of a high-precision 3-UPU parallel mechanism. Robotica, 2014, 32(3): 341–355
https://doi.org/10.1017/S0263574713000696
|
| 17 |
Dehkordi M B, Frisoli A, Sotgiu E, . Modelling and experimental evaluation of a static balancing technique for a new horizontally mounted 3-UPU parallel mechanism. International Journal of Advanced Robotic Systems, 2012, 9(193): 1–12
|
| 18 |
Liang C H, Gu H, Ceccarelli M, . Design and operation of a tripod walking robot via dynamics simulation. Robotica, 2011, 29(05): 733–743
https://doi.org/10.1017/S0263574710000615
|
| 19 |
Huston R L. Principles of Biomechanics.Boca Raton: CRC Press, 2009, 344–347
|
| 20 |
Adams G G, Nosonovsky M. Contact modeling—Forces. Tribology International, 2000, 33(5–6): 431–442
https://doi.org/10.1016/S0301-679X(00)00063-3
|
| 21 |
Rose J, Gamble J G. Human walking.<Date>3rd ed</Date>. Philadelphia: Lippincott Williams & Wilkins, 2005
|
| [1] |
Supplementary Material 1
|
Video 
|
| [2] |
Supplementary Material 2
|
Video
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|