|
|
|
Gear fault diagnosis using gear meshing stiffness identified by gearbox housing vibration signals |
Xiaoluo YU1, Yifan HUANGFU1, Yang YANG2, Minggang DU2, Qingbo HE1( ), Zhike PENG1 ), Zhike PENG1 |
1. State Key Laboratory of Mechanical System and Vibration, Shanghai Jiao Tong University, Shanghai 200240, China
2. Science and Technology on Vehicle Transmission Laboratory, China North Vehicle Research Institute, Beijing 100072, China |
|
|
|
|
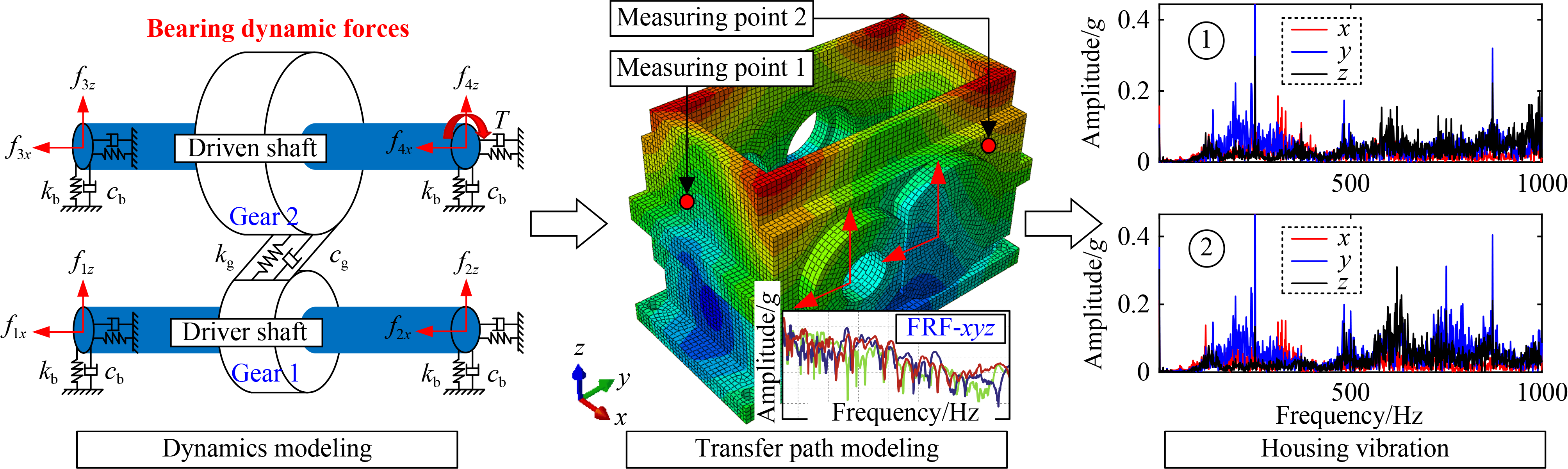
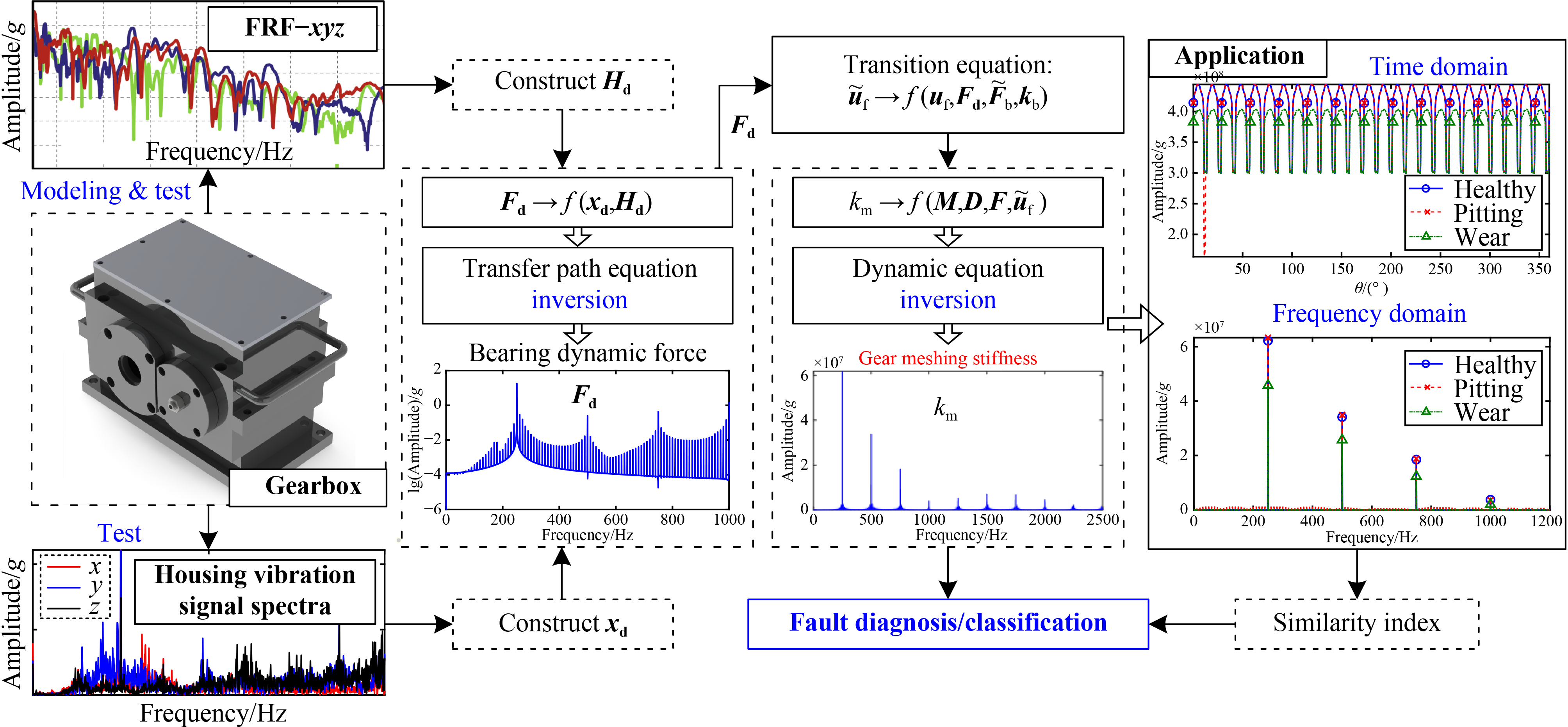
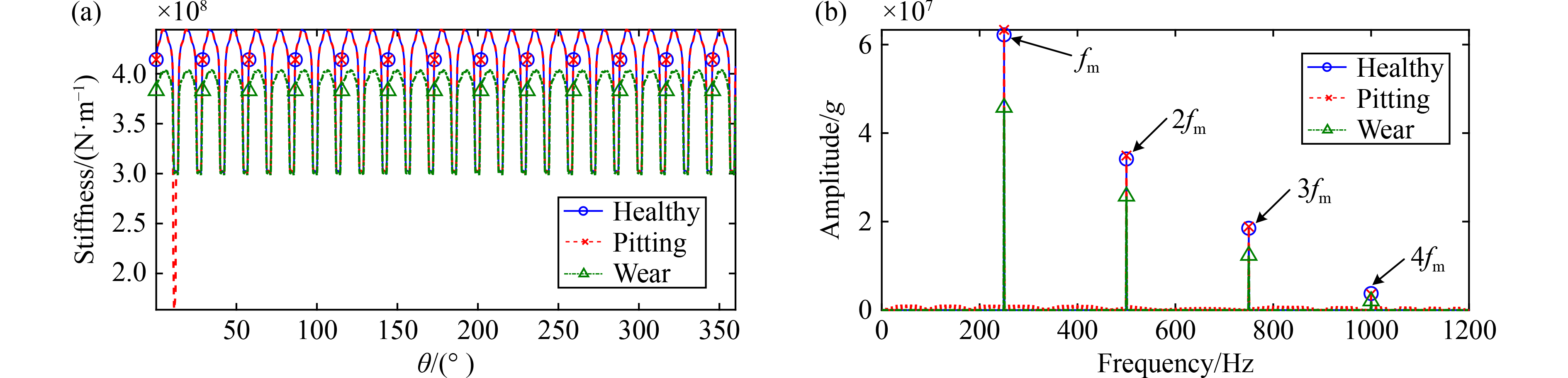
Abstract Gearbox fault diagnosis based on vibration sensing has drawn much attention for a long time. For highly integrated complicated mechanical systems, the intercoupling of structure transfer paths results in a great reduction or even change of signal characteristics during the process of original vibration transmission. Therefore, using gearbox housing vibration signal to identify gear meshing excitation signal is of great significance to eliminate the influence of structure transfer paths, but accompanied by huge scientific challenges. This paper establishes an analytical mathematical description of the whole transfer process from gear meshing excitation to housing vibration. The gear meshing stiffness (GMS) identification approach is proposed by using housing vibration signals for two stages of inversion based on the mathematical description. Specifically, the linear system equations of transfer path analysis are first inverted to identify the bearing dynamic forces. Then the dynamic differential equations are inverted to identify the GMS. Numerical simulation and experimental results demonstrate the proposed method can realize gear fault diagnosis better than the original housing vibration signal and has the potential to be generalized to other speeds and loads. Some interesting properties are discovered in the identified GMS spectra, and the results also validate the rationality of using meshing stiffness to describe the actual gear meshing process. The identified GMS has a clear physical meaning and is thus very useful for fault diagnosis of the complicated equipment.
|
| Keywords
gearbox fault diagnosis
meshing stiffness
identification
transfer path
signal processing
|
|
Corresponding Author(s):
Qingbo HE
|
|
Just Accepted Date: 15 June 2022
Issue Date: 23 November 2022
|
|
| 1 |
F F Ding , Z G Tian . Integrated prognosis for wind turbine gearbox condition-based maintenance considering time-varying load and crack initiation time uncertainty. International Journal of Reliability Quality and Safety Engineering, 2021, 28(4): 2150024
https://doi.org/10.1142/S0218539321500248
|
| 2 |
P A Higgs , R Parkin , M Jackson , A Al-Habaibeh , F Zorriassatine , J Coy . A survey on condition monitoring systems in industry. In: Proceedings of the 7th Biennial Conference on Engineering Systems Design and Analysis. Manchester: ASME, 2004, 163–178
https://doi.org/10.1115/ESDA2004-58216
|
| 3 |
Z Meng , G X Shi , F L Wang . Vibration response and fault characteristics analysis of gear based on time-varying mesh stiffness. Mechanism and Machine Theory, 2020, 148: 103786
https://doi.org/10.1016/j.mechmachtheory.2020.103786
|
| 4 |
D Wang , K L Tsui . Two novel mixed effects models for prognostics of rolling element bearings. Mechanical Systems and Signal Processing, 2018, 99: 1–13
https://doi.org/10.1016/j.ymssp.2017.06.004
|
| 5 |
K B Liu , N Z Gebraeel , J J Shi . A data-level fusion model for developing composite health indices for degradation modeling and prognostic analysis. IEEE Transactions on Automation Science and Engineering, 2013, 10(3): 652–664
https://doi.org/10.1109/TASE.2013.2250282
|
| 6 |
C Saunders, M O Stitson, J Weston, L Bottou, B Schӧlkopf, A Smola. Support Vector Machine-Reference Manual. Technical Report CSD-TR-98-03, 2002
|
| 7 |
N E Huang , Z Shen , S R Long , M C Wu , H H Shih , Q A Zheng , N C Yen , C C Tung , H H Liu . The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 1998, 454(1971): 903–995
https://doi.org/10.1098/rspa.1998.0193
|
| 8 |
J Gilles . Empirical wavelet transform. IEEE Transactions on Signal Processing, 2013, 61(16): 3999–4010
https://doi.org/10.1109/TSP.2013.2265222
|
| 9 |
N Li , W G Huang , W J Guo , G Q Gao , Z K Zhu . Multiple enhanced sparse decomposition for gearbox compound fault diagnosis. IEEE Transactions on Instrumentation and Measurement, 2020, 69(3): 770–781
https://doi.org/10.1109/TIM.2019.2905043
|
| 10 |
S Q Chen , X J Dong , Z K Peng , W M Zhang , G Meng . Nonlinear chirp mode decomposition: a variational method. IEEE Transactions on Signal Processing, 2017, 65(22): 6024–6037
https://doi.org/10.1109/TSP.2017.2731300
|
| 11 |
K Dragomiretskiy , D Zosso . Variational mode decomposition. IEEE Transactions on Signal Processing, 2014, 62(3): 531–544
https://doi.org/10.1109/TSP.2013.2288675
|
| 12 |
I Daubechies , J F Lu , H T Wu . Synchrosqueezed wavelet transforms: an empirical mode decomposition-like tool. Applied and Computational Harmonic Analysis, 2011, 30(2): 243–261
https://doi.org/10.1016/j.acha.2010.08.002
|
| 13 |
D Q He , C Y Liu , Z Z Jin , R Ma , Y J Chen , S Shan . Fault diagnosis of flywheel bearing based on parameter optimization variational mode decomposition energy entropy and deep learning. Energy, 2022, 239: 122108
https://doi.org/10.1016/j.energy.2021.122108
|
| 14 |
S V V S N Pichika , R Yadav , S Geetha Rajasekharan , H M Praveen , V Inturi . Optimal sensor placement for identifying multi-component failures in a wind turbine gearbox using integrated condition monitoring scheme. Applied Acoustics, 2022, 187: 108505
https://doi.org/10.1016/j.apacoust.2021.108505
|
| 15 |
H Shen, F Zhao, J G Mao, C Zhang, W Hu. Fault diagnosis of abnormal fuel injection of small aviation piston engine. Journal of Aerospace Power, 2021, 36(4): 861–873 (in Chinese)
|
| 16 |
P Tamilselvan , P F Wang . Failure diagnosis using deep belief learning based health state classification. Reliability Engineering & System Safety, 2013, 115: 124–135
https://doi.org/10.1016/j.ress.2013.02.022
|
| 17 |
Y G Lei , F Jia , J Lin , S B Xing , S X Ding . An intelligent fault diagnosis method using unsupervised feature learning towards mechanical Big Data. IEEE Transactions on Industrial Electronics, 2016, 63(5): 3137–3147
https://doi.org/10.1109/TIE.2016.2519325
|
| 18 |
S Y Shao , S Mcaleer , R Q Yan , P Baldi . Highly accurate machine fault diagnosis using deep transfer learning. IEEE Transactions on Industrial Informatics, 2019, 15(4): 2446–2455
https://doi.org/10.1109/TII.2018.2864759
|
| 19 |
C Lu , Z Y Wang , W L Qin , J Ma . Fault diagnosis of rotary machinery components using a stacked denoising autoencoder-based health state identification. Signal Processing, 2017, 130: 377–388
https://doi.org/10.1016/j.sigpro.2016.07.028
|
| 20 |
D T Hoang , X T Tran , M Van , H J Kang . A deep neural network-based feature fusion for bearing fault diagnosis. Sensors, 2021, 21(1): 244
https://doi.org/10.3390/s21010244
|
| 21 |
X Wang , H Y Gu , T Y Wang , W Zhang , A H Li , F L Chu . Deep convolutional tree-inspired network: a decision-tree-structured neural network for hierarchical fault diagnosis of bearings. Frontiers of Mechanical Engineering, 2021, 16(4): 814–828
https://doi.org/10.1007/s11465-021-0650-6
|
| 22 |
J Liu , K B Zhou , C Y Yang , G L Lu . Imbalanced fault diagnosis of rotating machinery using autoencoder-based SuperGraph feature learning. Frontiers of Mechanical Engineering, 2021, 16(4): 829–839
https://doi.org/10.1007/s11465-021-0652-4
|
| 23 |
T Z Hong , Z Wang , X Luo , W N Zhang . State-of-the-art on research and applications of machine learning in the building life cycle. Energy and Building, 2020, 212: 109831
https://doi.org/10.1016/j.enbuild.2020.109831
|
| 24 |
H Yin , Z Z Li , J K Zuo , H D Liu , K Yang , F Li . Wasserstein generative adversarial network and convolutional neural network (WG-CNN) for bearing fault diagnosis. Mathematical Problems in Engineering, 2020, 2020: 2604191
https://doi.org/10.1155/2020/2604191
|
| 25 |
K L Gao , W Y Guo , X C Yu , B Liu , A Z Yu , X P Wei . Deep induction network for small samples classification of hyperspectral images. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 3462–3477
https://doi.org/10.1109/JSTARS.2020.3002787
|
| 26 |
Z X Hu , D Y Wu , F P Nie , R Wang . Generalization bottleneck in deep metric learning. Information Sciences, 2021, 581: 249–261
https://doi.org/10.1016/j.ins.2021.09.023
|
| 27 |
S N Wang , A Xieeryazidan , X F Zhang , J X Zhou . An improved computational method for vibration response and radiation noise analysis of two-stage gearbox. IEEE Access, 2020, 8: 85973–85988
https://doi.org/10.1109/ACCESS.2020.2990938
|
| 28 |
Y X Li, L M Sun. Structural deformation reconstruction by the Penrose−Moore pseudo-inverse and singular value decomposition-estimated equivalent force. Structural Health Monitoring, 2020 (in press)
|
| 29 |
Z Chen , Z Wang , Z H Wang , T H T Chan . Comparative studies on the criteria for regularization parameter selection based on moving force identification. Inverse Problems in Science and Engineering, 2021, 29(2): 153–173
https://doi.org/10.1080/17415977.2020.1781848
|
| 30 |
M Aucejo . Structural source identification using a generalized Tikhonov regularization. Journal of Sound and Vibration, 2014, 333(22): 5693–5707
https://doi.org/10.1016/j.jsv.2014.06.027
|
| 31 |
Y F Zhang , J S Zhu . Damage identification for bridge structures based on correlation of the bridge dynamic responses under vehicle load. Structures, 2021, 33: 68–76
https://doi.org/10.1016/j.istruc.2021.04.022
|
| 32 |
J S Hwang , A Kareem , H Kim . Wind load identification using wind tunnel test data by inverse analysis. Journal of Wind Engineering and Industrial Aerodynamics, 2011, 99(1): 18–26
https://doi.org/10.1016/j.jweia.2010.10.004
|
| 33 |
M Chao , H Hongxing , X Feng . The identification of external forces for a nonlinear vibration system in frequency domain. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2014, 228(9): 1531–1539
https://doi.org/10.1177/0954406213509085
|
| 34 |
Q Sun. Aerodynamic load identification of helicopter rotor blade based on hybrid force-modal analysis. Thesis for the Master’s Degree. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017 (in Chinese)
|
| 35 |
H Dai , X H Long , F Chen , J Bian . Experimental investigation of the ring-planet gear meshing forces identification. Journal of Sound and Vibration, 2021, 493: 115844
https://doi.org/10.1016/j.jsv.2020.115844
|
| 36 |
D A He , F Chen , X Chao , X H Long . Numerical calculation and experimental measurement for gear mesh force of planetary gear transmissions. Mechanical Systems and Signal Processing, 2022, 162: 108085
https://doi.org/10.1016/j.ymssp.2021.108085
|
| 37 |
X L Yu , Z W Li , Q B He , Y Yang , M G Du , Z K Peng . Gearbox fault diagnosis based on bearing dynamic force identification. Journal of Sound and Vibration, 2021, 511: 116360
https://doi.org/10.1016/j.jsv.2021.116360
|
| 38 |
N Yamamoto , T Tsuji , M Murase , K Urakabe , T Yoshimura . Decomposition of frequency response functions into paths. Mechanical Systems and Signal Processing, 2022, 166: 108457
https://doi.org/10.1016/j.ymssp.2021.108457
|
| 39 |
S Drača. Finite element model of a double-stage helical gear reduction. Thesis for the Master’s Degree. Windsor: University of Windsor, 2006
|
| 40 |
Y M Zhang , Q B Wang , H Ma , J Huang , C Y Zhao . Dynamic analysis of three-dimensional helical geared rotor system with geometric eccentricity. Journal of Mechanical Science and Technology, 2013, 27(11): 3231–3242
https://doi.org/10.1007/s12206-013-0846-8
|
| 41 |
J Plunt . Finding and fixing vehicle NVH problems with transfer path analysis. Sound and Vibration, 2005, 39(11): 12–16
|
| 42 |
Y Jia , Z C Yang , N Guo , L Wang . Random dynamic load identification based on error analysis and weighted total least squares method. Journal of Sound and Vibration, 2015, 358: 111–123
https://doi.org/10.1016/j.jsv.2015.07.035
|
| 43 |
D Calvetti, S Morigi, L Reichel, F Sgallari. Tikhonov regularization and the L-curve for large discrete ill-posed problems. Journal of Computational and Applied Mathematics, 2000, 123(1–2): 423–446
https://doi.org/10.1016/S0377-0427(00)00414-3
|
| 44 |
H G Choi, A N Thite, D J Thompson. Comparison of methods for parameter selection in Tikhonov regularization with application to inverse force determination. Journal of Sound and Vibration, 2007, 304(3–5): 894–917
https://doi.org/10.1016/j.jsv.2007.03.040
|
| 45 |
Y Saad , M H Schultz . GMRES: a generalized minimal residual algorithm for solving nonsymmetric linear systems. SIAM Journal on Scientific and Statistical Computing, 1986, 7(3): 856–869
https://doi.org/10.1137/0907058
|
| 46 |
Y F Huangfu , K K Chen , H Ma , X Li , H Z Han , Z F Zhao . Meshing and dynamic characteristics analysis of spalled gear systems: a theoretical and experimental study. Mechanical Systems and Signal Processing, 2020, 139: 106640
https://doi.org/10.1016/j.ymssp.2020.106640
|
| 47 |
K K Chen , Y F Huangfu , H Ma , Z T Xu , X Li , B C Wen . Calculation of mesh stiffness of spur gears considering complex foundation types and crack propagation paths. Mechanical Systems and Signal Processing, 2019, 130: 273–292
https://doi.org/10.1016/j.ymssp.2019.05.014
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|