|
|
|
A comprehensive analysis of a 3-P (Pa) S spatial parallel manipulator |
Yuzhe LIU1,2,Liping WANG1,2,*( ),Jun WU1,2,Jinsong WANG1,2 ),Jun WU1,2,Jinsong WANG1,2 |
1. State Key Laboratory of Tribology and Institute of Manufacturing Engineering, Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China
2. Beijing Key Laboratory of Precision/Ultra-precision Manufacturing Equipments and Control, Beijing 100084, China |
|
|
|
|
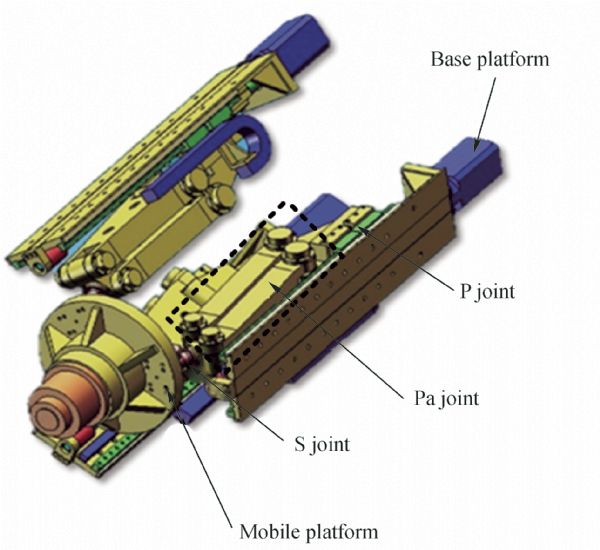
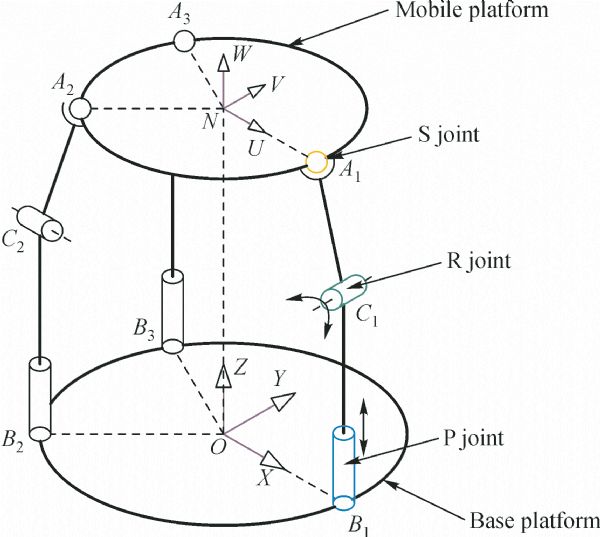
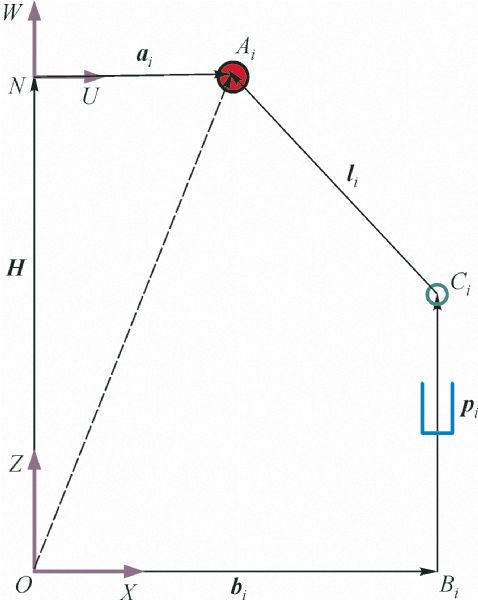
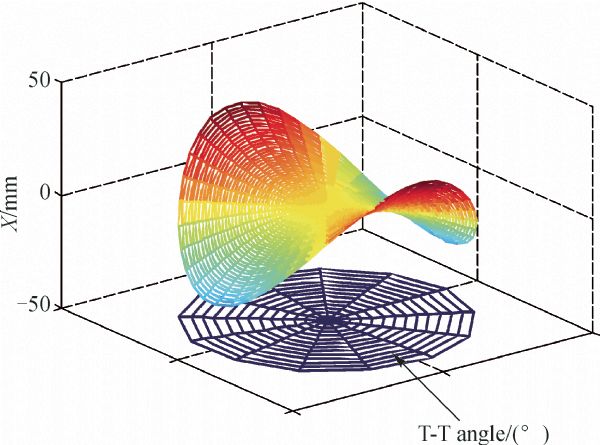
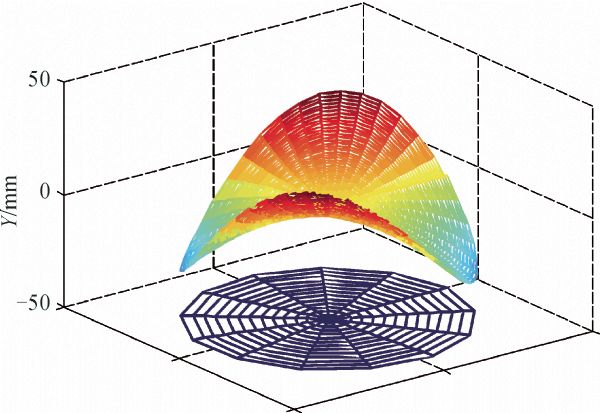
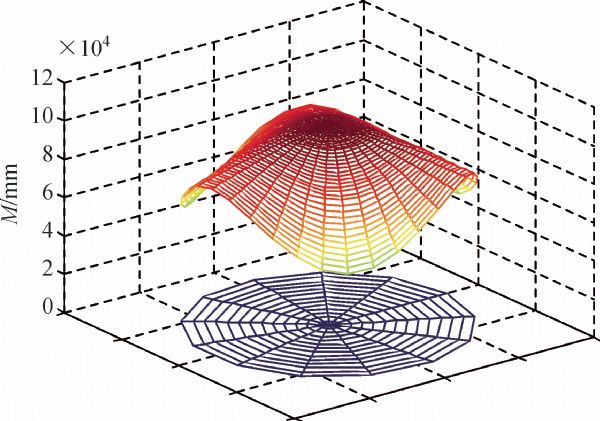
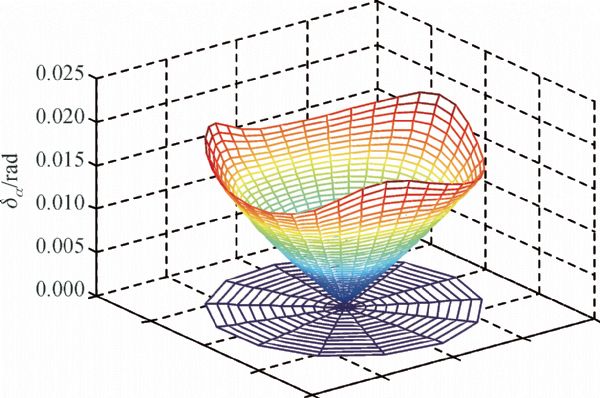
Abstract In this paper, a novel 3-degree of freedom (3-DOF) spatial parallel kinematic machine (PKM) is analyzed. The manipulator owns three main motions (two rotations and one translation) and three concomitant motions (one rotation and two translations). At first, the structure of this spatial PKM is simplified according to the characteristic of each limb. Secondly, the kinematics model of this spatial PKM is set up. In addition, the relationship between the main motions and concomitant motions is studied. The workspaces respectively based on the outputs and inputs are derived and analyzed. Furthermore, the velocity model is put forward. Two indexes based on the velocity model are employed to investigate the performance of this spatial PKM. At last, the output error model can be obtained and simulated. The comprehensive kinematics analysis in this paper is greatly useful for the future applications of this spatial PKM.
|
| Keywords
parallel mechanism
concomitant motions
kinematics
workspaces
error model
|
|
Corresponding Author(s):
Liping WANG
|
|
Online First Date: 10 February 2015
Issue Date: 01 April 2015
|
|
| 1 |
Zubizarreta A, Marcos M, Cabanes I, Redundant sensor based control of the 3RRR parallel robot. Mechanism and Machine Theory, 2012, 54: 1–17
https://doi.org/10.1016/j.mechmachtheory.2012.03.004
|
| 2 |
Kucuk S. A dexterity comparison for 3-DOF planar parallel manipulators with two kinematic chains using genetic algorithms. Mechatronics, 2009, 19(6): 868–877
https://doi.org/10.1016/j.mechatronics.2009.04.011
|
| 3 |
Staicu S. Power requirement comparison in the 3-RPR planar parallel robot dynamics. Mechanism and Machine Theory, 2009, 44(5): 1045–1057
https://doi.org/10.1016/j.mechmachtheory.2008.05.009
|
| 4 |
Zhu D, Feng Y, Cai J, Kinematic analysis of 3-DOF perpendicular parallel manipulator with flexure hinge. In: Proceedings of Third International Conference on Knowledge Discovery and Data Mining. IEEE, 2010, 363–366
https://doi.org/10.1109/WKDD.2010.16
|
| 5 |
Merlet J P. Parallel Robots. London: Kluwer Academic Publishers, 2000
|
| 6 |
Merlet J P. Direct kinematics of parallel manipulators. IEEE Transactions on Robotics and Automation, 1993, 9(6): 842–846
https://doi.org/10.1109/70.265928
|
| 7 |
Harib K, Srinivasan K. Kinematic and dynamic analysis of Stewart platform-based machine tool structures. Robotica, 2003, 21(05): 541–554
https://doi.org/10.1017/S0263574703005046
|
| 8 |
Lee K M, Shah D K. Kinematic analysis of a three-degrees-of-freedom in-parallel actuated manipulator. IEEE Journal of Robotics and Automation, 1988, 4(3): 354–360
https://doi.org/10.1109/56.796
|
| 9 |
Yang P, Waldron K J, Orin D E. Kinematics of a three degree-of-freedom motion platform for a low-cost driving simulator. Recent Advances in Robot Kinematics, 1996, 89–98
https://doi.org/10.1007/978-94-009-1718-7_9
|
| 10 |
Ceccarelli M. A new 3 DOF spatial parallel mechanism. Mechanism and Machine Theory, 1997, 32(8): 895–902
https://doi.org/10.1016/S0094-114X(97)00019-0
|
| 11 |
Gosselin C, Angeles J. The optimum kinematic design of a spherical three-degree-of-freedom parallel manipulator. Journal of Mechani-cal Design, 1989, 111(2): 202–207
https://doi.org/10.1115/1.3258984
|
| 12 |
Wu J, Wang J, Wang L, Performance comparison of three planar 3-DOF parallel manipulators with 4-RRR, 3-RRR and 2-RRR structures. Mechatronics, 2010, 20(4): 510–517
https://doi.org/10.1016/j.mechatronics.2010.04.012
|
| 13 |
Wu J, Chen X, Wang L, Dynamic load-carrying capacity of a novel redundantly actuated parallel conveyor. Nonlinear Dynamics, 2014, 78(1): 241–250
https://doi.org/10.1007/s11071-014-1436-8
|
| 14 |
Wu J, Li T, Wang J, Performance analysis and comparison of planar 3-DOF parallel manipulators with one and two additional branches. Journal of Intelligent & Robotic Systems, 2013, 72(1): 73–82
https://doi.org/10.1007/s10846-013-9824-8
|
| 15 |
Liu Y, Wu J, Wang L, Determination of the maximal singularity-free zone of 4-RRR redundant parallel manipulators and its application on investigating length ratios of links. Robotica (in press)
https://doi.org/10.1017/S0263574714002720
|
| 16 |
Karouia M, Hervé J M. A three-dof tripod for generating spherical rotation. Advances in Robot Kinematics, 2000, 395–402
https://doi.org/10.1007/978-94-011-4120-8_41
|
| 17 |
Vischer P, Clavel R. Argos: A novel 3-DoF parallel wrist mechanism. International Journal of Robotics Research, 2000, 19(1): 5–11
https://doi.org/10.1177/02783640022066707
|
| 18 |
Di Gregorio R. A new parallel wrist using only revolute pairs: The 3-RUU wrist. Robotica, 2001, 19(03): 305–309
https://doi.org/10.1017/S0263574700003192
|
| 19 |
Zlatanov D, Bonev I A, Gosselin C M. Constraint singularities of parallel mechanisms. In: Proceedings of IEEE International Conference on Robotics and Automation (ICRA’02). IEEE, 2002, 1: 496–502
https://doi.org/10.1109/ROBOT.2002.1013408
|
| 20 |
Fang Y, Tsai L W. Structure synthesis of a class of 3-DOF rotational parallel manipulators. IEEE Transactions on Robotics and Automation, 2004, 20(1): 117–121
https://doi.org/10.1109/TRA.2003.819597
|
| 21 |
Li Y, Xu Q. Kinematic analysis of a 3-PRS parallel manipulator. Robotics and Computer-integrated Manufacturing, 2007, 23(4): 395–408
https://doi.org/10.1016/j.rcim.2006.04.007
|
| 22 |
Chen C, Huang Y M, Han X Z, Study and analysis of The 3-PRS parallel mechanism. In: Proceedings of International Conference on Mechatronics and Automation (ICMA 2009). IEEE, 2009, 1515–1520
https://doi.org/10.1109/ICMA.2009.5245972
|
| 23 |
Huang P, Wang J, Wang L, Kinematical error analysis and identification of a 3-PRS parallel mechanism. Journal of Tsinghua University (Science and Technology), 2010, 50(11): 1811–1814, 1819 (in Chinese)
|
| 24 |
Huang P, Wang J, Wang L, Identification of structure errors of 3-PRS-XY mechanism with regularization method. Mechanism and Machine Theory, 2011, 46(7): 927–944
https://doi.org/10.1016/j.mechmachtheory.2011.02.006
|
| 25 |
Li Y, Xu Q. Kinematics and inverse dynamics analysis for a general 3-PRS spatial parallel mechanism. Robotica, 2005, 23(02): 219– 229
https://doi.org/10.1017/S0263574704000797
|
| 26 |
Zhang X, Fang H. Optimization of a 3-PRS parallel manipulator based on interval analysis. In: Proceedings of 2012 10th World Congress on Intelligent Control and Automation (WCICA). IEEE, 2012, 2452–2456
https://doi.org/10.1109/WCICA.2012.6358285
|
| 27 |
Yuan W H, Tsai M S. A novel approach for forward dynamic analysis of 3-PRS parallel manipulator with consideration of friction effect. Robotics and Computer-integrated Manufacturing, 2014, 30(3): 315–325
https://doi.org/10.1016/j.rcim.2013.10.009
|
| 28 |
Gosselin C M. Geometric analysis of parallel mechanisms. Dissertation for the Doctoral Degree. Quebec: Laval University, 2002, 75–81
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|